หมายเลขรุ่น:
AGVC-24V100A-YT
ชื่อสินค้า :
เครื่องชาร์จแบตเตอรี่ลิเธียม 24V100A AGVC-24V100A-YT สำหรับยานยนต์นำทางอัตโนมัติ




วิดีโอผลิตภัณฑ์
ภาพวาดคำแนะนำ

ลักษณะเฉพาะและข้อดี
-
เทคโนโลยีการสลับแบบอ่อน PFC+LLC ที่ใช้เพื่อรับรองค่าแฟกเตอร์กำลังไฟฟ้าสูง ฮาร์มอนิกกระแสไฟฟ้าต่ำ แรงดันไฟฟ้าและริปเปิลกระแสไฟฟ้าต่ำ ประสิทธิภาพการแปลงสูงถึง 94% และความหนาแน่นของกำลังไฟฟ้าโมดูลสูง
01 -
ด้วยคุณสมบัติการสื่อสาร CAN สามารถสื่อสารกับแบตเตอรี่ลิเธียม BMS เพื่อจัดการการชาร์จแบตเตอรี่อย่างชาญฉลาด เพื่อให้มั่นใจว่าการชาร์จจะเร็วขึ้นและแบตเตอรี่จะมีอายุการใช้งานยาวนานขึ้น
02 -
ดีไซน์ที่ออกแบบตามหลักสรีรศาสตร์และ UI ที่ใช้งานง่าย ครอบคลุมทั้งหน้าจอ LCD แผงสัมผัส ไฟแสดงสถานะ LED และปุ่มต่างๆ ผู้ใช้สามารถดูข้อมูลและสถานะการชาร์จ ใช้งานและตั้งค่าต่างๆ ได้
03 -
พร้อมระบบป้องกันการชาร์จไฟเกิน แรงดันไฟเกิน กระแสเกิน อุณหภูมิเกิน ไฟฟ้าลัดวงจร การสูญเสียเฟสอินพุต แรงดันไฟอินพุตเกิน แรงดันไฟอินพุตต่ำเกินไป การชาร์จแบตเตอรี่ลิเธียมผิดปกติ และการวินิจฉัยและแสดงปัญหาในการชาร์จ
04 -
ในโหมดอัตโนมัติ จะสามารถชาร์จได้เองโดยไม่ต้องมีคนคอยดูแล นอกจากนี้ยังมีโหมดแมนนวลอีกด้วย
05 -
พร้อมคุณสมบัติการยืดหด รองรับการจัดส่งแบบไร้สาย การระบุตำแหน่งอินฟราเรด และ CAN, WIFI หรือการสื่อสารแบบมีสาย
06 -
การกระจายสัญญาณไร้สาย 2.4G, 4G หรือ 5.8G การวางตำแหน่งอินฟราเรดในรูปแบบการรับ-ส่ง การสะท้อน หรือการสะท้อนแบบกระจาย สามารถปรับแต่งแปรงและความสูงของแปรงได้
07 -
ช่วงแรงดันไฟฟ้าอินพุตกว้างที่สามารถให้การชาร์จแบตเตอรี่ที่เสถียรและเชื่อถือได้ภายใต้แหล่งจ่ายไฟที่ไม่เสถียร
08 -
เทคโนโลยีการยืดหดแบบอัจฉริยะเพื่อให้สามารถชาร์จ AGV ได้ด้วยพอร์ตชาร์จที่ด้านข้าง
09 -
เซนเซอร์โฟโตอิเล็กทริกอินฟราเรดที่มีความแม่นยำสูงช่วยให้วางตำแหน่งได้แม่นยำยิ่งขึ้น
010 -
สามารถชาร์จ AGV ได้ด้วยพอร์ตชาร์จที่ด้านข้าง ด้านหน้า หรือด้านล่าง
011 -
การสื่อสารแบบไร้สายเพื่อให้เครื่องชาร์จ AGV สามารถสื่อสารและเชื่อมต่อ AGV ได้อย่างชาญฉลาด (AGV หนึ่งเครื่องกับเครื่องชาร์จ AGV หนึ่งเครื่องหรือหลายเครื่อง เครื่องชาร์จ AGV หนึ่งเครื่องกับ AGV หนึ่งเครื่องหรือหลายเครื่อง)
012 -
แปรงโลหะผสมเหล็ก-คาร์บอน มีคุณสมบัตินำไฟฟ้าได้ดี แข็งแรงทนทาน ฉนวนไฟฟ้าดีเยี่ยม ทนความร้อนสูง และทนต่อการกัดกร่อนสูง
013

แอปพลิเคชัน
เพื่อให้การชาร์จ AGV (Automated Guided Vehicle) รวดเร็ว ปลอดภัย และอัตโนมัติ รวมถึงรถยก AGV, AGV สำหรับการคัดแยกและการขนส่ง, AGV สำหรับการลากจูงแบบแฝง, หุ่นยนต์จอดรถอัจฉริยะ, AGV สำหรับการลากจูงแบบใช้งานหนักที่สนามบิน ท่าเรือ และเหมืองแร่






ข้อมูลจำเพาะ
| Mโอเดลเลขที่ | AGVC-24V100A-YT |
| เรตติ้งIอินพุตVแรงดันไฟฟ้า | 220VAC±15% |
| ป้อนข้อมูลVแรงดันไฟฟ้าRแองเจ | สายไฟสามเฟสเดียว |
| ป้อนข้อมูลCปัจจุบันRแองเจ | <16เอ |
| เรตติ้งOเอาท์พุตPอำนาจ | 2.4 กิโลวัตต์ |
| เรตติ้งOเอาท์พุตCปัจจุบัน | 100เอ |
| เอาท์พุตVแรงดันไฟฟ้าRแองเจ | 16VDC-32VDC |
| ปัจจุบันLเลียนแบบAปรับได้Rแองเจ | 5A-100A |
| จุดสูงสุดNออยส์ | ≤1% |
| แรงดันไฟฟ้าRการควบคุมAความแม่นยำ | ≤±0.5% |
| ปัจจุบันSแฮริง | ≤±5% |
| ประสิทธิภาพ | โหลดเอาต์พุต ≥ 50% เมื่อได้รับการจัดอันดับ ประสิทธิภาพโดยรวม ≥ 92% |
| โหลดเอาต์พุต<50% เมื่อได้รับการจัดอันดับ ประสิทธิภาพของเครื่องจักรทั้งหมดคือ ≥99% | |
| การป้องกัน | ไฟฟ้าลัดวงจร กระแสเกิน แรงดันไฟเกิน การเชื่อมต่อย้อนกลับ กระแสย้อนกลับ |
| ความถี่ | 50Hz- 60Hz |
| ค่ากำลังไฟฟ้า (PF) | ≥0.99 |
| ความเพี้ยนของกระแสไฟฟ้า (HD1) | ≤5% |
| ป้อนข้อมูลPการหมุน | แรงดันไฟเกิน, แรงดันไฟต่ำ, กระแสเกิน |
| การทำงานEสิ่งแวดล้อมCเงื่อนไข | ในร่ม |
| การทำงานTอุณหภูมิ | -20%~45℃ ทำงานปกติ; 45℃~65℃ ลดเอาต์พุต; มากกว่า 65℃ ปิดเครื่อง |
| พื้นที่จัดเก็บTอุณหภูมิ | -40℃- 75℃ |
| ญาติHความทึบแสง | 0 – 95% |
| ระดับความสูง | เอาท์พุตโหลดเต็มที่ ≤2000ม. >2000ม. ให้ใช้ตามข้อกำหนด 5.11.2 ใน GB/T389.2-1993 |
| ไดอิเล็กทริกSความแข็งแกร่ง
| เข้า-ออก: 2800VDC/10mA/1 นาที |
| ในเปลือก: 2800VDC/10mA/1 นาที | |
| OUT-SHELL: 2800VDC/10mA/1 นาที | |
| ขนาดและWแปด | |
| ขนาด (รวมทุกอย่าง)) | 530(สูง)×580(กว้าง)×390(ลึก) |
| สุทธิWแปด | 35กก. |
| ระดับของPการหมุน | ไอพี20 |
| อื่นs | |
| บีเอ็มเอสCการสื่อสารMจริยธรรม | การสื่อสาร CAN |
| บีเอ็มเอสCการเชื่อมต่อMจริยธรรม | CAN-WIFI หรือการติดต่อทางกายภาพของโมดูล CAN ที่ AGV และเครื่องชาร์จ |
| การจัดส่ง Cการสื่อสารMจริยธรรม | มอดูบัส TCP, มอดูบัส เอพี |
| การจัดส่ง Cการเชื่อมต่อMจริยธรรม | Modbus-wifi หรืออีเทอร์เน็ต |
| แบนด์ WIFI | 2.4G, 4G หรือ 5.8G |
| โหมดการเริ่มชาร์จ | อินฟราเรด, Modbus, CAN-WIFI |
| เอจีวีแปรง พีพารามิเตอร์ | ปฏิบัติตามมาตรฐาน AiPower หรือภาพวาดที่ลูกค้าให้มา |
| โครงสร้างของCฮาร์เกอร์ | ทั้งหมดในหนึ่งเดียว |
| การชาร์จไฟMจริยธรรม | แปรงยืดหดได้ |
| วิธีการทำความเย็น | ระบบระบายความร้อนด้วยอากาศอัด |
| กล้องส่องทางไกลจังหวะการแปรง | 200 มม. |
| ดีดีระยะห่างสำหรับ พีการวางตำแหน่ง | 185มม.-325มม. |
| ความสูงจากเอจีวีแปรงตรงกลางถึง Gกลม | 90MM-400MM; สามารถปรับแต่งได้ |
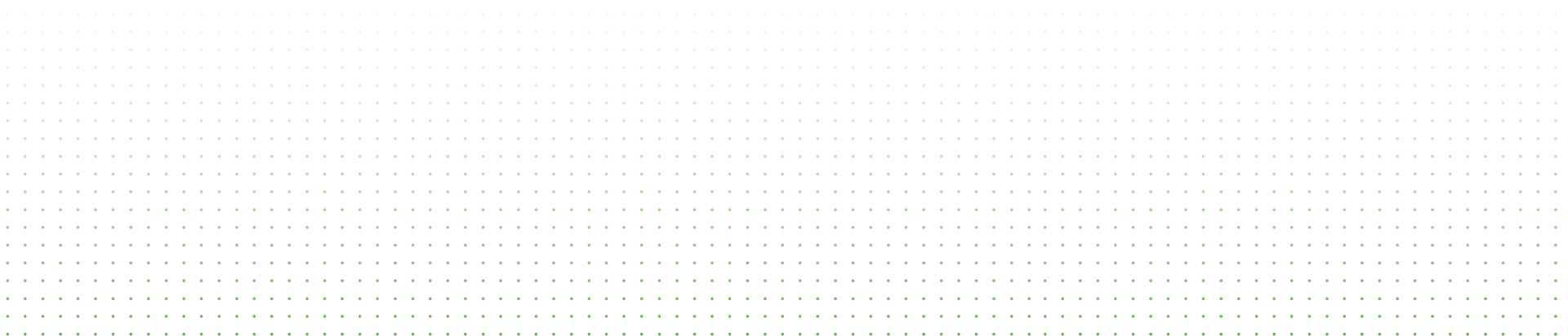
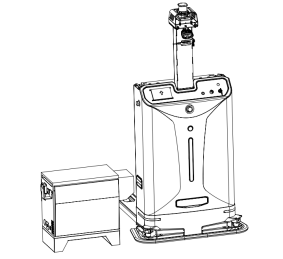
คู่มือการติดตั้ง
แกะกล่องไม้ออก โปรดใช้เครื่องมือระดับมืออาชีพ
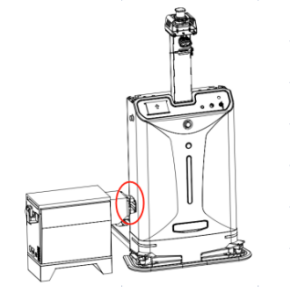
2.ใช้ไขควงถอดสกรูที่ด้านล่างของกล่องไม้ที่ยึดเครื่องชาร์จ EV ออก

วางเครื่องชาร์จในแนวนอนและปรับขาตั้งเพื่อให้แน่ใจว่าอยู่ในตำแหน่งการชาร์จที่ถูกต้อง ตรวจสอบให้แน่ใจว่าสิ่งกีดขวางอยู่ห่างจากด้านซ้ายและด้านขวาของเครื่องชาร์จมากกว่า 0.5 เมตร

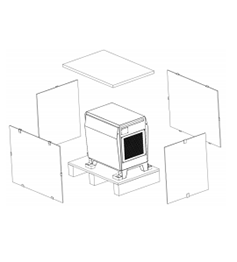
หากสวิตช์ของเครื่องชาร์จปิดอยู่ ให้เสียบปลั๊กเครื่องชาร์จเข้ากับเต้ารับตามจำนวนเฟส กรุณาขอให้ช่างมืออาชีพดำเนินการนี้

สิ่งที่ควรทำและไม่ควรทำในการติดตั้ง
- วางที่ชาร์จในแนวนอน วางบนวัสดุที่ทนความร้อน ห้ามคว่ำลง ห้ามเอียง
- เครื่องชาร์จต้องมีพื้นที่เพียงพอสำหรับการระบายความร้อน ตรวจสอบให้แน่ใจว่าระยะห่างระหว่างช่องลมเข้าและผนังมากกว่า 300 มม. และระยะห่างระหว่างผนังและช่องลมออกมากกว่า 1,000 มม.
- เครื่องชาร์จจะเกิดความร้อนขณะใช้งาน เพื่อให้แน่ใจว่าระบายความร้อนได้ดี โปรดตรวจสอบให้แน่ใจว่าเครื่องชาร์จทำงานในสภาพแวดล้อมที่มีอุณหภูมิ -20%~45℃
- ตรวจสอบให้แน่ใจว่าวัตถุแปลกปลอม เช่น เส้นใย เศษกระดาษ เศษไม้ หรือเศษโลหะ จะไม่เข้าไปในเครื่องชาร์จ ไม่เช่นนั้นอาจเกิดไฟไหม้ได้
- หลังจากเชื่อมต่อกับแหล่งจ่ายไฟแล้ว ห้ามสัมผัสแปรงหรือขั้วแปรง เพื่อหลีกเลี่ยงความเสี่ยงจากการถูกไฟฟ้าช็อต
- ขั้วต่อกราวด์จะต้องต่อลงดินอย่างดีเพื่อป้องกันไฟฟ้าช็อตหรือไฟไหม้

คู่มือการใช้งาน
-
01
เปิดสวิตช์เพื่อเข้าสู่โหมดสแตนด์บาย
-
02
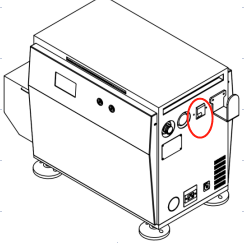
2.AGV จะส่งสัญญาณขอชาร์จเมื่อ AGV ไม่มีพลังงานเพียงพอ
-
03
AGV จะเคลื่อนที่ไปที่เครื่องชาร์จโดยอัตโนมัติและทำการวางตำแหน่งร่วมกับเครื่องชาร์จ
-
04
หลังจากวางตำแหน่งเรียบร้อยแล้ว เครื่องชาร์จจะยื่นแปรงออกมาในพอร์ตชาร์จของ AGV โดยอัตโนมัติเพื่อชาร์จ AGV
-
05
หลังจากการชาร์จเสร็จสิ้น แปรงของเครื่องชาร์จจะหดกลับโดยอัตโนมัติ และเครื่องชาร์จจะเข้าสู่โหมดสแตนด์บายอีกครั้ง

สิ่งที่ควรทำและไม่ควรทำในการปฏิบัติงาน
- ตรวจสอบให้แน่ใจว่าเครื่องชาร์จจะเชื่อมต่อกับแหล่งจ่ายไฟได้เฉพาะภายใต้คำแนะนำของผู้เชี่ยวชาญเท่านั้น
- ตรวจสอบให้แน่ใจว่าเครื่องชาร์จแห้งและไม่มีสิ่งแปลกปลอมอยู่ภายในเมื่อใช้งาน
- ตรวจสอบให้แน่ใจว่าสิ่งกีดขวางอยู่ห่างจากด้านซ้ายและด้านขวาของเครื่องชาร์จมากกว่า 0.5 เมตร
- ทำความสะอาดช่องรับและระบายอากาศทุก ๆ 30 วันปฏิทิน
- ห้ามถอดประกอบเครื่องชาร์จด้วยตนเอง มิฉะนั้นอาจเกิดไฟฟ้าช็อตได้ เครื่องชาร์จอาจเสียหายระหว่างการถอดประกอบ และคุณอาจไม่ได้รับบริการหลังการขาย



