Modellnr.:
AGVC-24V100A-YT
Produktnavn:
24V100A litiumbatterilader AGVC-24V100A-YT for automatiserte kjøretøy




PRODUKTVIDEO
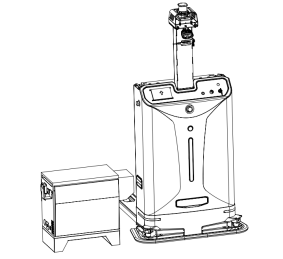
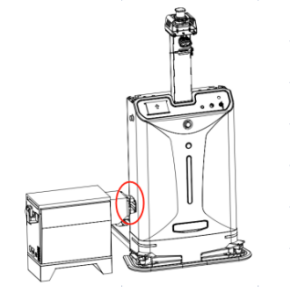
INSTRUKSJONSTEGNING

EGENSKAPER OG FORDELER
-
PFC+LLC myk svitsjeteknologi brukes til å sikre høy effektfaktor, lave strømharmoniske, liten spennings- og strømrippel, konverteringseffektivitet på opptil 94 % og høy tetthet av moduleffekt.
01 -
Med CAN-kommunikasjonsfunksjonen kan den kommunisere med litiumbatteriets BMS for intelligent å administrere batterilading for å sikre rask lading og lengre batterilevetid.
02 -
Ergonomisk design og brukervennlig brukergrensesnitt, inkludert LCD-skjerm, berøringspanel, LED-indikatorlampe og knapper. Sluttbrukere kan se ladeinformasjon og status, utføre forskjellige operasjoner og innstillinger.
03 -
Med beskyttelse mot overlading, overspenning, overstrøm, overtemperatur, kortslutning, fasetap på inngang, overspenning på inngang, underspenning på inngang, unormal lading av litiumbatteri, og diagnostisering og visning av ladeproblemer.
04 -
I automatisk modus kan den lades automatisk uten tilsyn. Den har også manuell modus.
05 -
Med teleskopfunksjon; Støtter trådløs forsendelse, infrarød posisjonering og CAN-, WIFI- eller kablet kommunikasjon.
06 -
Trådløs sending med 2,4 G, 4 G eller 5,8 G. Infrarød posisjonering i sender-mottak, refleksjon eller diffus refleksjon. Tilpasning tilgjengelig for børster og børstens høyde.
07 -
Bredt inngangsspenningsområde som kan gi batteriet stabil og pålitelig lading under ustabil strømforsyning.
08 -
Smart teleskopteknologi for å kunne lade AGV med ladeport på siden.
09 -
Høypresisjons infrarød fotoelektrisk sensor for å sikre mer presis posisjonering.
010 -
Kan lades for AGV med ladeport på siden, foran eller nederst.
011 -
Trådløs kommunikasjon for å smart få AGV-ladere til å kommunisere og koble AGV til. (én AGV til én eller flere AGV-ladere, én AGV-lader til én eller flere AGV-ladere)
012 -
Børste i stål-karbonlegering med god elektrisk ledningsevne. Sterk mekanisk styrke, utmerket isolasjon, god varmebestandighet og høy korrosjonsbestandighet.
013

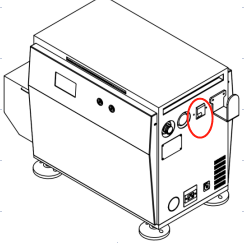
SØKNAD
Å tilby rask, sikker og AUTOMATISK lading for AGV-er (automatisert guidet kjøretøy), inkludert AGV-gaffeltrucker, logistikk-sorterings- og jekke-AGV-er, latente trekk-AGV-er, intelligente parkeringsroboter og kraftige trekk-AGV-er på flyplasser, havner og gruver.






SPESIFIKASJONER
| MmodellIngen. | AGVC-24V100A-YT |
| VurdertIinndataValderdom | 220 V AC ± 15 % |
| InndataValderdomRengel | Enfase treflødes |
| InndataCnåværendeRengel | <16A |
| VurdertOutgangPmakt | 2,4 kW |
| VurdertOutgangCnåværende | 100A |
| ProduksjonValderdomRengel | 16VDC–32VDC |
| NåværendeLimitereAjusterbarRengel | 5A–100A |
| ToppNoise | ≤1 % |
| SpenningRreguleringAnøyaktighet | ≤±0,5 % |
| NåværendeSharing | ≤±5% |
| Effektivitet | Utgangsbelastning ≥ 50 %, ved nominell effekt er den totale virkningsgraden ≥ 92 %; |
| Utgangsbelastning <50%, når den er vurdert, er effektiviteten til hele maskinen ≥99% | |
| Beskyttelse | Kortslutning, overstrøm, overspenning, reverskobling, reversstrøm |
| Hyppighet | 50Hz–60Hz |
| Effektfaktor (PF) | ≥0,99 |
| Strømforvrengning (HD1) | ≤5 % |
| InndataPbeskyttelse | Overspenning, underspenning, overstrøm |
| ArbeiderEmiljøCforhold | Innendørs |
| ArbeiderTtemperatur | -20 %~45 ℃, normal drift; 45 ℃~65 ℃, reduserer effekten; over 65 ℃, avstengning. |
| LagringTtemperatur | -40℃–75℃ |
| SlektningHfuktighet | 0–95 % |
| Høyde | ≤2000m fulllastutgang; >2000m bruk den i samsvar med bestemmelsene i 5.11.2 i GB/T389.2-1993. |
| DielektriskSstyrke
| INN-UT: 2800VDC/10mA/1Min |
| INNE-SKALL: 2800VDC/10mA/1Min | |
| UTENDØRSSKALL: 2800VDC/10mA/1Min | |
| Dimensjoner ogWåtte | |
| Dimensjoner (alt-i-ett)) | 530 (H) × 580 (B) × 390 (D) |
| NettWåtte | 35 kg |
| Grad avPbeskyttelse | IP20 |
| Annens | |
| BMSCkommunikasjonMmetode | CAN-kommunikasjon |
| BMSCtilkoblingMmetode | CAN-WIFI eller fysisk kontakt mellom CAN-moduler på AGV og lader |
| Utsendelse CkommunikasjonMmetode | Modbus TCP, Modbus AP |
| Utsendelse CtilkoblingMmetode | Modbus-wifi eller Ethernet |
| WIFI-bånd | 2,4G, 4G eller 5,8G |
| Modus for å starte lading | Infrarød, Modbus, CAN-WIFI |
| AGVPensel Pparametere | Følg AiPower-standarden eller tegninger levert av kunder |
| Struktur avCharger | Alt i ett |
| LadingMmetode | Børsteteleskopering |
| Kjølemetode | Tvungen luftkjøling |
| TeleskopiskPenselstrøk | 200 mm |
| God Davstandfor Pposisjonering | 185 mm–325 mm |
| Høyde fraAGVBørstesenter til Grund | 90MM–400MM; Tilpasning tilgjengelig |
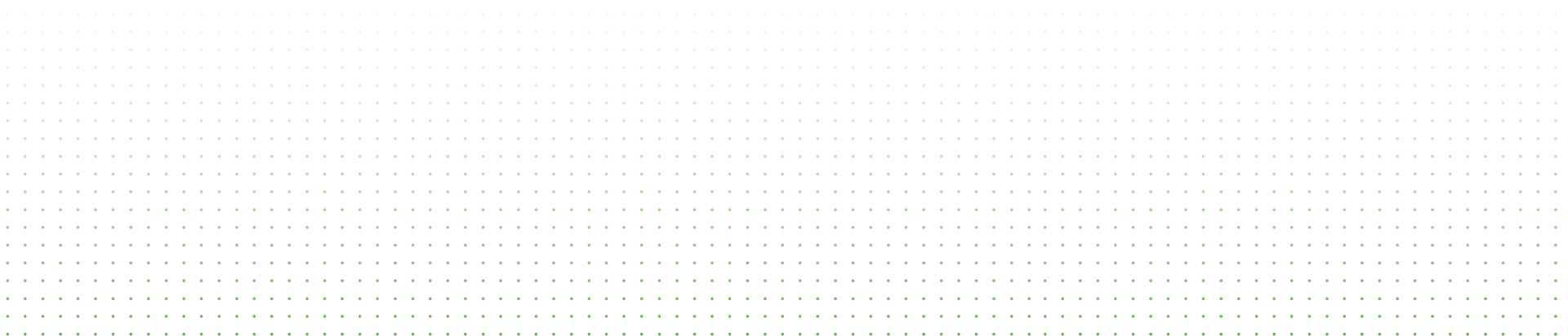
INSTALLASJONSVEJLEDNING
Pakk ut trekassen. Vennligst bruk profesjonelle verktøy.
2. Bruk en skrutrekker til å demontere skruene nederst på trekassen som fester elbilladeren.

Plasser laderen horisontalt og juster beina for å sikre riktig ladeposisjon. Sørg for at det er mer enn 0,5 m hindringer fra venstre og høyre side av laderen.

Hvis laderens bryter er av, koble laderens støpsel til stikkontakten basert på antall faser. Vennligst be fagfolk om å gjøre dette arbeidet.

Ting du bør og ikke bør gjøre ved installasjon
- Plasser laderen vannrett. Plasser laderen på noe som er varmebestandig. IKKE plasser den opp ned. IKKE la den skråne.
- Laderen trenger nok plass til kjøling. Sørg for at avstanden mellom luftinntaket og veggen er mer enn 300 mm, og at avstanden mellom veggen og luftutløpet er mer enn 1000 mm.
- Laderen vil produsere varme under drift. For å sikre god kjøling, sørg for at laderen fungerer i et miljø der temperaturen er -20 % ~ 45 ℃.
- Sørg for at fremmedlegemer som fibre, papirbiter, treflis eller metallfragmenter IKKE kommer inn i laderen, da det ellers kan oppstå brann.
- Etter tilkobling til strømforsyningen, IKKE berør børsten eller børsteelektroden for å unngå risiko for elektrisk støt.
- Jordterminalen MÅ være godt jordet for å forhindre elektrisk støt eller brann.

BRUKSANVISNING
-
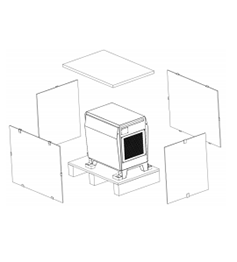
01
Slå på bryteren for å sette maskinen i standby-modus.
-
02
2. AGV-en sender et signal som ber om lading når AGV-en ikke har nok strøm.
-
03
AGV-en vil bevege seg til laderen av seg selv og posisjonere seg med laderen.
-
04
Etter at posisjoneringen er ferdig, vil laderen automatisk stikke børsten ut i ladeporten på AGV for å lade AGV.
-
05
Etter at ladingen er ferdig, vil laderens børste automatisk trekkes tilbake, og laderen vil gå tilbake til standby-modus.

Ting du bør og ikke bør gjøre i drift
- Sørg for at laderen kun kobles til strømforsyningen under veiledning av fagfolk.
- Sørg for at laderen er tørr og fri for fremmedlegemer inni når den er i bruk.
- Sørg for at det er mer enn 0,5 meter avstand mellom hindringer og venstre og høyre side av laderen.
- Rengjør luftinntaket og -utløpet hver 30. kalenderdag.
- Ikke demonter laderen selv, ellers kan det føre til elektrisk støt. Laderen kan bli skadet under demontering, og du kan miste tilgangen til ettersalgsservice på grunn av dette.



