Hejmara Modelê:
AGVC-24V100A-YT
Navê Berhemê:
Şarjêra Bateriya Lîtyûmê ya 24V100A AGVC-24V100A-YT ji bo Wesayîtên Rêberkirî yên Otomatîk




VÎDEOYA BERHEMÊ
NÊZÎKIRINA TALÎMATAN

TAYBETMENDÎ & AVANTAJ
-
Teknolojiya guheztina nerm a PFC+LLC tê bikar anîn da ku faktora hêzê ya bilind, harmonîkên herikê yên nizm, voltaja û pêlên herikê yên piçûk, karîgeriya veguherînê ya heta %94 û dendika bilind a hêza modulê misoger bike.
01 -
Bi taybetmendiya ragihandina CAN, ew dikare bi BMS-ya bataryaya lîtyûmê re têkilî daynin da ku şarjkirina bateriyê bi aqilane birêve bibe da ku şarjkirina bilez û temenê dirêjtir ê bateriyê misoger bike.
02 -
Dizayna xuyangê ergonomîk û UI-ya bikarhêner-dostane, tevî dîmendera LCD, panela destdanê, ronahiya nîşana LED û bişkokan. Bikarhênerên dawîn dikarin agahdariya barkirinê û rewşa wê bibînin, operasyon û mîhengên cûda bikin.
03 -
Bi parastina li hember zêdebarkirin, zêdevoltaja, zêdeherikîn, zêdebûna germahiyê, kurteçûn, windabûna qonaxa têketinê, zêdevoltaja têketinê, kêmvoltaja têketinê, şarjkirina neasayî ya bateriya lîtyûmê, û teşhîs û nîşandana pirsgirêkên şarjkirinê.
04 -
Di moda otomatîk de, ew dikare bêyî ku ji hêla kesekî ve were çavdêrîkirin bixweber şarj bibe. Her wiha moda destî jî heye.
05 -
Bi taybetmendiya teleskopkirinê; Piştgiriya şandina bêtêl, pozîsyona înfrared û ragihandina CAN, WIFI an bi têl.
06 -
Dispatkirina bêtêl a 2.4G, 4G an 5.8G. Pozîsyonkirina înfrared di warê şandin-wergirtin, refleks an refleksa belavbûyî de. Xwesazkirin ji bo firçeyê û bilindahiya firçeyê heye.
07 -
Rêzeya voltaja têketinê ya fireh ku dikare şarjkirina stabîl û pêbawer a bateriyê di bin dabînkirina hêzê ya nestabîl de peyda bike.
08 -
Teknolojiya teleskopîk a jîr ji bo şarjkirina AGV-ê bi porta şarjê ya li kêlekê.
09 -
Sensorê fotoelektrîkî yê înfrared ê rastbûna bilind ji bo misogerkirina pozîsyona rasttir.
010 -
Dikare ji bo AGV-ê bi porta şarjê ya li kêlekê, li pêş an jî li jêr şarj bike.
011 -
Têkiliya bêtêl ji bo çêkirina jîr a şarjkerên AGV da ku AGV bi hev re têkilî daynin û bi hev ve girêdin. (yek AGV bi yek an şarjkerên AGV yên cuda, yek şarjkerê AGV bi yek an AGV yên cuda)
012 -
Firçeya ji hevbendiya pola-karbonê bi îzolasyoneke elektrîkê ya baş. Hêza mekanîkî ya bihêz, îzolasyoneke hêja, berxwedana germê ya mezin û berxwedana bilind a korozyonê.
013

BIKARANÎNÎ
Ji bo dabînkirina şarjkirina bilez, ewle û OTOMATÎK ji bo AGV (Wesayîta Rêberkirî ya Otomatîk), di nav de forkliftên AGV, AGV-yên rêzkirina lojîstîkê, AGV-yên kişandina veşartî, robotên parkkirinê yên jîr, AGV-yên kişandina giran li balafirgehan, bendergehan û madenan.






TAYBETMENDÎ
| ModelNa. | AGVC-24V100A-YT |
| NirxandinInutputVoltage | 220VAC ± 15% |
| BeyanVoltageRang | Yek-qonax sê-têl |
| BeyanCnihaRang | <16A |
| NirxandinOderanaPserdest | 2.4KW |
| NirxandinOderanaCniha | 100A |
| KarûabrVoltageRang | 16VDC-32VDC |
| VêgaLteqlîdkirinAguhêrbarRang | 5A-100A |
| SerîNoise | ≤1% |
| WoltîRrêziknameArastbûn | ≤±0.5% |
| VêgaSharkirin | ≤±5% |
| Kêrhatîya bicîanîn | Barkirina derketinê ≥% 50, dema ku tê nirxandin, karîgeriya giştî ≥% 92; |
| Barkirina derketinê <50%, dema ku tê nirxandin, karîgeriya tevahiya makîneyê ≥99% e | |
| Parastinî | Kurteçûn, zêdeherikîn, zêdevoltaja, girêdana berevajî, herikîna berevajî |
| Pircarînî | 50Hz- 60Hz |
| Faktora Hêzê (PF) | ≥0.99 |
| Çewtiya Niha (HD1) | ≤5% |
| BeyanPparastin | Voltaja zêde, voltaja kêm, herika zêde |
| Kar dikeEjîngehCşert û merc | Hundir |
| Kar dikeTgermahî | -20%~45℃, bi awayekî normal dixebite; 45℃~65℃, deravê kêm dike; ji 65℃ zêdetir, raweste. |
| EmbarkirinîTgermahî | -40℃- 75℃ |
| MerivHşilbûn | 0 – 95% |
| Bilindayî | Derana barkirina tevahî ≤2000m; >2000m wê li gorî bendên 5.11.2 di GB/T389.2-1993 de bikar bînin. |
| DîelektrîkShêz
| KETIN-DERKETIN: 2800VDC/10mA/1Min |
| DI NAV QALIKÊ DE: 2800VDC/10mA/1Min | |
| DERVEYA QALIKÊ: 2800VDC/10mA/1Min | |
| Pîvan ûWheşt | |
| Pîvan (hemû-di-yek) | 530(Bilindahî)×580(Firehî)×390(Kûrahî) |
| TorWheşt | 35Kg |
| PileyaPparastin | IP20 |
| Yên dins | |
| BMSCragihandinMrêbaz | ragihandina CAN |
| BMSCgirêdanMrêbaz | CAN-WIFI an têkiliya fîzîkî ya modulên CAN li AGV û şarjkerê |
| Şandina CragihandinMrêbaz | Modbus TCP, Modbus AP |
| Şandina CgirêdanMrêbaz | Modbus-wifi an Ethernet |
| Bandên WIFI | 2.4G, 4G an 5.8G |
| Moda Destpêkirina Şarjkirinê | Jêderka ... |
| AGVFirçeya Parametran | Li gorî standarda AiPower an jî nexşeyên ku ji hêla xerîdaran ve hatine peyda kirin tevbigerin |
| PêkhateyaCharger | Hemû di yek de |
| BarkirinMrêbaz | Teleskopkirina Firçeyê |
| Rêbaza sarkirinê | Sarkirina bi hewaya bi zorê |
| TeleskopîkLêdana Firçeyê | 200MM |
| D-ya başdûrbûnji bo Pbicihkirin | 185MM-325MM |
| Bilindahî jiAGVNavenda firçeyê ber bi G vegirrover | 90MM-400MM; Xwesazkirin heye |
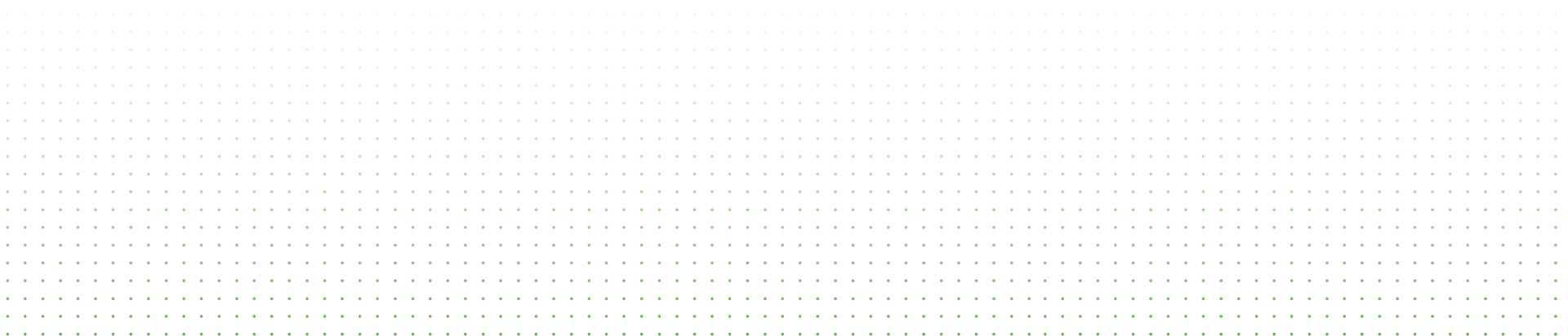
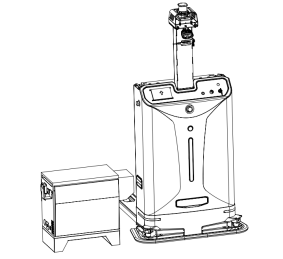
RÊBERNAMEYA SAZKIRINÊ
Qutiya darîn ji pakêtê veke. Ji kerema xwe amûrên profesyonel bi kar bîne.
٢. Bi karanîna pêçbirkê, pêçên li binê qutiya darîn ên ku şarjkerê EV-yê rast dikin, ji hev veqetînin.

Şarjkerê deyne ser asoyî û lingên wê rast bike da ku pozîsyona şarjkirinê ya rast misoger bike. Piştrast bike ku astengî ji aliyên çep û rastê yên şarjkerê ji 0.5M zêdetir dûr in.

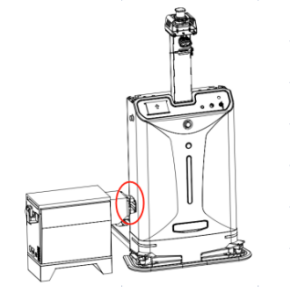
Bi şertê ku guhêra şarjêrê girtî be, pêveka şarjêrê li gorî hejmara qonaxan bi prizê ve girêdin. Ji kerema xwe vî karî ji pisporan bixwazin.

Tiştên Ku Divê Û Neyên Kirin Di Sazkirinê de
- Şarjêr deyne ser cihekî horizontal. Şarjêr deyne ser tiştekî ku li hember germê berxwedêr e. Serûbin NEKÊŞÎNE. Nehêle ku ew xwar bibe.
- Şarjker ji bo sarkirinê cîhek têr hewce dike. Piştrast bike ku mesafeya di navbera têketina hewayê û dîwêr de ji 300 mm zêdetir e, û mesafeya di navbera dîwêr û derketina hewayê de ji 1000 mm zêdetir e.
- Şarjker dema ku dixebite germê derdixe. Ji bo sarbûneke baş, ji kerema xwe piştrast bikin ku şarjker di hawîrdorekê de dixebite ku germahî -20%~45℃ ye.
- Dîqat bikin ku tiştên biyanî yên wekî têl, perçeyên kaxezê, çîpên dar, an jî perçeyên metal NEÇIN nav şarjêrê, an na dibe ku agir çêbibe.
- Piştî girêdana bi dabînkirina elektrîkê re, ji bo dûrketina ji xetera şoka elektrîkê, dest NEDIN firçe an elektroda firçeyê.
- DIVÊ termînala erdê baş were erdêkirin da ku rê li ber şoka elektrîkê an agir were girtin.

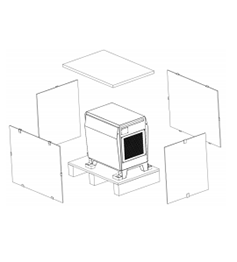
RÊBERNAMEYA XEBATÊ
-
01
Ji bo ku makîneyê bixe moda standby, guhêrbarê vekin.
-
02
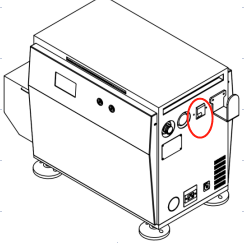
٢. Dema ku AGV hêza wê têrê neke, AGV dê sînyalek bişîne û ji bo şarjkirinê bipirse.
-
03
AGV dê bi xwe ber bi şarjkerê ve biçe û bi şarjkerê re pozîsyonê bike.
-
04
Piştî ku pozîsyonkirin baş qediya, şarjker dê bixweber firçeya xwe derxe nav porta şarjkirinê ya AGV-ê da ku AGV-ê şarj bike.
-
05
Piştî ku şarjkirin qediya, firçeya şarjkerê dê bixweber vekişe û şarjker dê dîsa bikeve moda standby.

Tiştên ku Di Operasyonê De Divê û Nayên Kirin
- Bawer bikin ku tenê di bin rêberiya pisporan de şarjker dê bi dabînkirina hêzê ve girêbide.
- Dema ku şarjker tê bikaranîn, piştrast be ku ew hişk e û di hundir de ti tiştên biyanî tune ne.
- Piştrast be ku astengî ji çep û rastê şarjkerê zêdetirî 0.5 M dûr in.
- Her 30 rojên carekê deriyê ketin û derketina hewayê paqij bikin.
- Şarjêr bi tena serê xwe ji hev veneqetînin, an na dê bibe sedema şoka elektrîkê. Dibe ku şarjêr di dema veqetandinê de zirarê bibîne û ji ber vê yekê dibe ku hûn ji xizmeta piştî firotanê sûd wernegirin.



