モデル番号:
AGVC-24V100A-YT
製品名:
無人搬送車用24V100Aリチウム電池充電器 AGVC-24V100A-YT




製品ビデオ
説明書

特徴と利点
-
PFC+LLC ソフト スイッチング テクノロジーは、高い力率、低い電流高調波、小さな電圧および電流リップル、最大 94% の変換効率、および高密度のモジュール電力を保証するために使用されます。
01 -
CAN 通信機能により、リチウム バッテリー BMS と通信してバッテリーの充電をインテリジェントに管理し、急速充電とバッテリー寿命の延長を実現します。
02 -
人間工学に基づいた外観デザインと、LCDディスプレイ、タッチパネル、LEDインジケーターライト、ボタンなどを含むユーザーフレンドリーなUIを備えています。エンドユーザーは充電情報やステータスを確認したり、様々な操作や設定を行うことができます。
03 -
過充電、過電圧、過電流、過熱、短絡、入力位相欠落、入力過電圧、入力低電圧、リチウム電池異常充電の保護機能を備え、充電問題を診断して表示します。
04 -
自動モードでは、人が監視しなくても自動的に充電されます。手動モードも搭載されています。
05 -
伸縮機能付き。ワイヤレスディスパッチ、赤外線測位、CAN、WIFI、または有線通信をサポートします。
06 -
2.4G、4G、または5.8Gのワイヤレス送信。送受信、反射、または拡散反射方式による赤外線測位。ブラシとブラシの高さはカスタマイズ可能です。
07 -
入力電圧範囲が広く、不安定な電源環境でもバッテリーに安定した信頼性の高い充電を提供します。
08 -
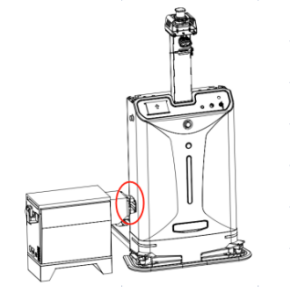
側面の充電ポートで AGV を充電できるスマート伸縮テクノロジー。
09 -
より正確な位置決めを保証する高精度赤外線光電センサー。
010 -
側面、前面、底面の充電ポートで AGV の充電が可能。
011 -
AGV 充電器がスマートに AGV と通信して接続できるようにするワイヤレス通信。(1 台の AGV と 1 台または複数の AGV 充電器、1 台の AGV 充電器と 1 台または複数の AGV)
012 -
優れた導電性を持つスチールカーボン合金ブラシ。強力な機械的強度、優れた絶縁性、優れた耐熱性、高い耐腐食性を備えています。
013

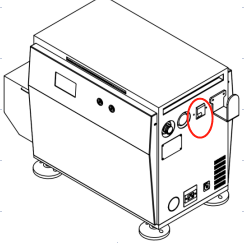
応用
AGVフォークリフト、物流仕分けジャッキAGV、潜在牽引AGV、インテリジェントパーキングロボット、空港、港、鉱山の大型牽引AGVなどのAGV(無人搬送車)に高速、安全、自動充電を提供します。






仕様
| Mモデルいいえ。 | AGVC-24V100A-YT |
| 評価I入力Vオルテージ | 220VAC±15% |
| 入力VオルテージRアンジュ | 単相3線 |
| 入力C現在のRアンジュ | 16A未満 |
| 評価O出力P力 | 2.4kW |
| 評価O出力C現在の | 100A |
| 出力VオルテージRアンジュ | 16VDC~32VDC |
| 現在LイミットA調節可能Rアンジュ | 5A-100A |
| ピークNオワーズ | ≤1% |
| 電圧R規制A精度 | ±0.5%以下 |
| 現在Sハリング | ≤±5% |
| 効率 | 出力負荷 ≥ 50%、定格時の全体効率 ≥ 92%; |
| 出力負荷<50%、定格時の機械全体の効率は≥99% | |
| 保護 | 短絡、過電流、過電圧、逆接続、逆電流 |
| 頻度 | 50Hz~60Hz |
| 力率(PF) | ≥0.99 |
| 電流歪み(HD1) | ≤5% |
| 入力P保護 | 過電圧、低電圧、過電流 |
| 働くE環境C条件 | 屋内 |
| 働くT温度 | -20%~45℃では正常に動作し、45℃~65℃では出力が低下し、65℃を超えるとシャットダウンします。 |
| ストレージT温度 | -40℃~75℃ |
| 相対的H明るさ | 0~95% |
| 高度 | ≤2000mの全負荷出力。 >2000mの場合は、GB/T389.2-1993の5.11.2の規定に従って使用してください。 |
| 誘電S強さ
| 入出力: 2800VDC/10mA/1分 |
| シェル内: 2800VDC/10mA/1分 | |
| アウトシェル: 2800VDC/10mA/1分 | |
| 寸法とW八 | |
| 寸法(オールインワン) | 530(高さ)×580(幅)×390(奥行き) |
| ネットW八 | 35キロ |
| 程度P保護 | IP20 |
| 他のs | |
| BMSCコミュニケーションM方法 | CAN通信 |
| BMSC接続M方法 | CAN-WIFIまたはAGVと充電器のCANモジュールの物理的な接触 |
| ディスパッチCコミュニケーションM方法 | Modbus TCP、Modbus AP |
| ディスパッチC接続M方法 | Modbus-Wi-Fiまたはイーサネット |
| Wi-Fiバンド | 2.4G、4G、または5.8G |
| 充電開始モード | 赤外線、Modbus、CAN-WIFI |
| 無人搬送車ブラシPパラメータ | AiPowerの標準または顧客から提供された図面に従ってください |
| の構造Cハーガー | オールインワン |
| 充電M方法 | ブラシ伸縮 |
| 冷却方法 | 強制空冷 |
| 伸縮式筆遣い | 200MM |
| 良いD距離Pの場合配置 | 185MM-325MM |
| 高さから無人搬送車ブラシセンターからGまでラウンド | 90MM-400MM; カスタマイズ可能 |
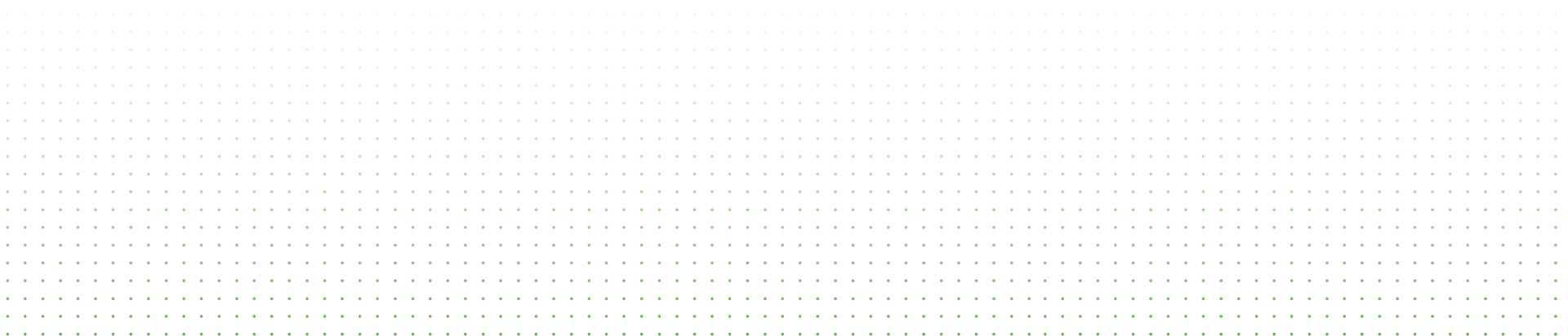
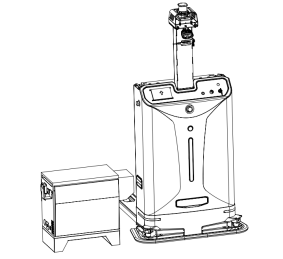
インストールガイド
木箱を開梱してください。必ず専門工具をご使用ください。
2. ドライバーを使用して、EV 充電器を固定している木箱の底にあるネジを取り外します。

充電器を水平に置き、脚を調整して正しい充電位置を確保してください。障害物が充電器の左右から0.5メートル以上離れていることを確認してください。

充電器のスイッチがオフになっている状態で、相数に応じて充電器のプラグをコンセントに接続してください。この作業は専門家にご依頼ください。

インストール時の注意事項
- 充電器は水平に置き、耐熱性のあるものの上に置きましょう。逆さまに置いたり、傾けたりしないでください。
- 充電器は冷却のために十分なスペースが必要です。吸気口と壁の距離は300mm以上、排気口と壁の距離は1000mm以上確保してください。
- 充電器は動作中に熱を発生します。適切な冷却を確保するため、-20%~45℃の環境でご使用ください。
- 繊維、紙片、木片、金属片などの異物が充電器内部に入らないようにしてください。火災の原因となる可能性があります。
- 電源に接続した後は、感電の危険を避けるため、ブラシまたはブラシ電極に触れないでください。
- 感電や火災を防止するために、アース端子は確実に接地する必要があります。

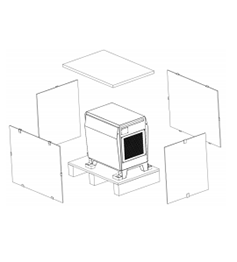
操作ガイド
-
01
スイッチをオンにして、マシンをスタンバイ モードにします。
-
02
2.AGV に十分な電力がない場合、AGV は充電を要求する信号を送信します。
-
03
AGVは自ら充電器まで移動し、充電器との位置合わせを行います。
-
04
位置決めが完了すると、充電器は自動的にブラシを AGV の充電ポートに突き出して AGV を充電します。
-
05
充電が完了すると、充電器のブラシが自動的に収納され、充電器は再びスタンバイモードになります。

運用上の注意事項
- 充電器を電源に接続する場合は必ず専門家の指導の下で行ってください。
- 充電器を使用する際は、充電器が乾いていて内部に異物が入っていないことを確認してください。
- 障害物が充電器の左右から0.5メートル以上離れていることを確認してください。
- 30 日ごとに空気の入口と出口を清掃してください。
- ご自身で充電器を分解しないでください。感電の原因となります。分解中に充電器が損傷し、アフターサービスを受けられなくなる可能性があります。



