Modelnûmer:
AGVC-24V100A-YT
Produktnamme:
24V100A Lithium Batterijlader AGVC-24V100A-YT foar Automatysk Begeliede Auto's




PRODUKT VIDEO
YNSTRUKSJETEKENING

KARAKTERISTIKEN EN FOARDIELEN
-
PFC+LLC sêfte switchingtechnology brûkt om in hege krêftfaktor, lege stroomharmoniken, lytse spannings- en stroomrimpel, konverzje-effisjinsje oant 94% en in hege tichtheid fan modulekrêft te garandearjen.
01 -
Mei de funksje fan CAN-kommunikaasje kin it kommunisearje mei lithiumbatterij BMS om batterijladen yntelligint te behearjen om rap opladen en in langere batterijlibben te garandearjen.
02 -
Ergonomysk ûntwerp en brûkerfreonlike brûkersynterface, ynklusyf LCD-display, touchpaniel, LED-yndikatorljocht en knoppen. Einbrûkers kinne ynformaasje oer it opladen en de status sjen, ferskate operaasjes en ynstellingen útfiere.
03 -
Mei beskerming tsjin oerlading, oerspanning, oerstroom, oertemperatuer, koartsluting, ferlies fan ynfierfaze, oerspanning fan ynfier, ûnderspanning fan ynfier, abnormaal opladen fan lithiumbatterijen, en diagnoaze en werjefte fan oplaadproblemen.
04 -
Yn automatyske modus kin it automatysk oplade sûnder tafersjoch fan in persoan. It hat ek in manuele modus.
05 -
Mei teleskopyske funksje; Stipe foar draadloze dispatching, ynfraread posysjonearring en CAN, WIFI of bedrade kommunikaasje.
06 -
2.4G, 4G of 5.8G Draadloze ferstjoering. Ynfraread posysjonearring yn stjoer-ûntfangst, refleksje of diffuse refleksje manier. Oanpassing beskikber foar boarstel en de hichte fan 'e boarstel.
07 -
Breed ynfierspanningsberik dat de batterij stabile en betroubere opladen kin leverje ûnder ynstabile stroomfoarsjenning.
08 -
Slimme teleskopyske technology om AGV's op te laden mei in oplaadpoarte oan 'e kant.
09 -
Heechpresyzje ynfraread fotoelektryske sensor om krekter posysjonearring te garandearjen.
010 -
Yn steat om op te laden foar AGV mei oplaadpoarte oan 'e kant, oan' e foarkant of oan 'e ûnderkant.
011 -
Draadloze kommunikaasje om AGV-laders op in tûke manier te meitsjen om te kommunisearjen en AGV te ferbinen. (ien AGV nei ien of ferskillende AGV-laders, ien AGV-lader nei ien of ferskillende AGV)
012 -
Boarstel fan stiel-koalstoflegering mei geweldige elektryske geliedingsfermogen. Sterke meganyske sterkte, poerbêste isolaasje, geweldige waarmtebestriding en hege korrosjebestriding.
013

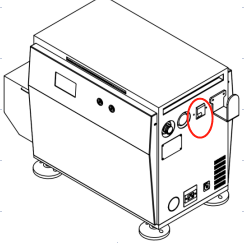
OANFRAACH
Om fluch, feilich en AUTOMATYSK opladen te leverjen foar AGV's (Automated Guided Vehicle), ynklusyf AGV-heftrucks, logistike sortear-krikken, latente traksje-AGV's, yntelliginte parkearrobots, swierlast-traksje-AGV's op fleanfjilden, seehavens en minen.






SPESIFIKAASJES
| MmodelNee. | AGVC-24V100A-YT |
| BeoardieleIynfierVâldens | 220VAC ± 15% |
| YnfierVâldensRange | Ienfaze trijetrieds |
| YnfierCaktueelRange | <16A |
| BeoardieleOútfierPmacht | 2.4KW |
| BeoardieleOútfierCaktueel | 100A |
| ÚtfierVâldensRange | 16VDC-32VDC |
| AktueelLimitearjeAferstelberRange | 5A-100A |
| PykNoise | ≤1% |
| SpanningRregeljouwingAkrektens | ≤±0.5% |
| AktueelSharing | ≤±5% |
| Effisjinsje | Utfierlading ≥ 50%, by beoardieling, de totale effisjinsje ≥ 92%; |
| Utfierlading <50%, as beoardiele, is de effisjinsje fan 'e heule masine ≥99% | |
| Beskerming | Koartsluting, oerstroom, oerspanning, omkearde ferbining, omkearde stroom |
| Frekwinsje | 50Hz - 60Hz |
| Machtsfaktor (PF) | ≥0.99 |
| Stroomferfoarming (HD1) | ≤5% |
| YnfierPbeskerming | Oerspanning, ûnderspanning, oerstroom |
| WurkjeEomjouwingCbetingsten | Binnen |
| WurkjeTtemperatuer | -20%~45℃, normaal wurkjend; 45℃~65℃, fermindere útfier; boppe 65℃, útskeakeling. |
| OpslachTtemperatuer | -40℃- 75℃ |
| RelatyfHfochtigens | 0 – 95% |
| Hichte | ≤2000m folsleine ladingútfier; >2000m brûk it neffens de bepalingen fan 5.11.2 yn GB/T389.2-1993. |
| DiëlektryskSkrêft
| YN-ÚT: 2800VDC/10mA/1Min |
| YN-SHELL: 2800VDC/10mA/1Min | |
| BÛTEN-SHELL: 2800VDC/10mA/1Min | |
| Ofmjittings enWacht | |
| Ofmjittings (alles-yn-ien)) | 530 (H) × 580 (B) × 390 (D) |
| NetWacht | 35 kg |
| Graad fanPbeskerming | IP20 |
| Oars | |
| BMSCkommunikaasjeMmetoade | CAN-kommunikaasje |
| BMSCferbiningMmetoade | CAN-WIFI of fysyk kontakt fan CAN-modules by AGV en lader |
| Ferstjoeren fan CkommunikaasjeMmetoade | Modbus TCP, Modbus AP |
| Ferstjoeren fan CferbiningMmetoade | Modbus-wifi of Ethernet |
| WIFI-bannen | 2.4G, 4G of 5.8G |
| Modus fan it starten fan it laden | Ynfraread, Modbus, CAN-WIFI |
| AGVKwast Pparameters | Folgje de AiPower-standert of tekeningen levere troch klanten |
| Struktuer fanCharker | Alles yn ien |
| OpladenMmetoade | Borstel Teleskopearjend |
| Koelmetoade | Twongen loftkoeling |
| TeleskopyskStroke fan kwast | 200MM |
| Goede Dôfstânfoar Pposysjonearring | 185MM-325MM |
| Hichte fanAGVBorstelsintrum nei de Grûn | 90MM-400MM; Oanpassing beskikber |
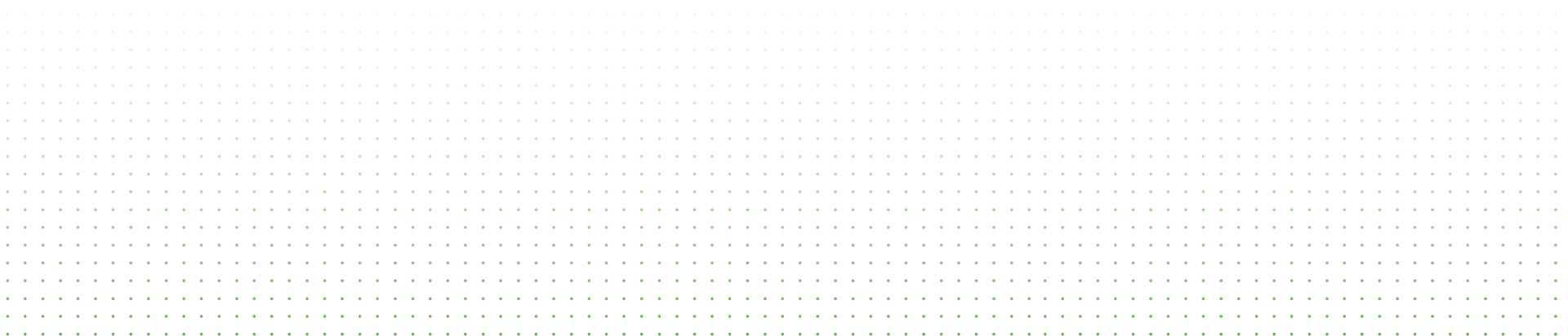
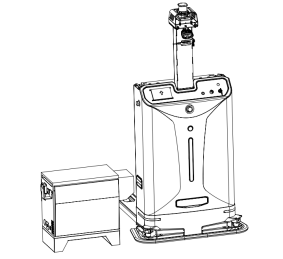
YNSTALLAASJEHANDLEIDING
Pak de houten doaze út. Brûk asjebleaft profesjoneel ark.
2. Brûk in skroevedraaier om de skroeven oan 'e ûnderkant fan 'e houten doaze te demontearjen dy't de EV-lader fêstmeitsje.

Set de lader horizontaal en ferstel de skonken om de juste laadposysje te garandearjen. Soargje derfoar dat obstakels mear as 0,5 meter fan 'e lofter- en rjochterkant fan' e lader ôf binne.

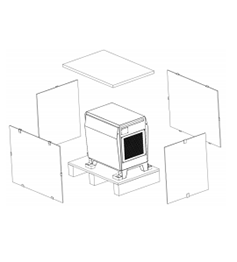
As de skeakel fan 'e lader út stiet, ferbine dan de stekker fan 'e lader mei it stopkontakt op basis fan it oantal fazen. Freegje asjebleaft professionals om dit wurk te dwaan.

Do's en Don'ts by ynstallaasje
- Set de lader horizontaal. Set de lader op eat dat waarmtebestindich is. Set it NET op 'e kop. Meitsje it NET skean.
- De lader hat genôch romte nedich foar koeling. Soargje derfoar dat de ôfstân tusken de loftynlaat en de muorre mear as 300 mm is, en de ôfstân tusken de muorre en de loftútlaat mear as 1000 mm is.
- De lader sil waarmte produsearje as er wurket. Om goede koeling te garandearjen, soargje derfoar dat de lader wurket yn in omjouwing dêr't de temperatuer -20%~45℃ is.
- Soargje derfoar dat frjemde objekten lykas fezels, stikken papier, houtsnippers of metaalfragmenten NET yn 'e lader komme, oars kin der brân feroarsake wurde.
- Nei it oansluten fan 'e stroomfoarsjenning, reitsje de boarstel of boarstelelektrode NET oan om it risiko op elektryske skok te foarkommen.
- De ierdterminal MOET goed ierd wêze om elektryske skokken of brân te foarkommen.

GEBRUKSANWIZING
-
01
Skeakelje de skeakel oan om de masine yn standby-modus te setten.
-
02
2.AGV sil in sinjaal stjoere dat freget om opladen as de AGV net genôch stroom hat.
-
03
De AGV sil sels nei de lader bewege en de posysjonearring mei de lader útfiere.
-
04
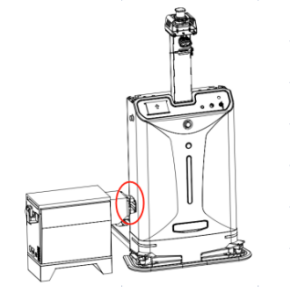
Nei't de posysjonearring goed dien is, sil de lader automatysk syn boarstel yn 'e oplaadpoarte fan AGV stekke om AGV op te laden.
-
05
Nei it opladen sil de boarstel fan 'e lader automatysk ynlutsen wurde en sil de lader wer nei de standby-modus gean.

Do's en Don'ts yn operaasje
- Soargje derfoar dat de lader allinich ûnder begelieding fan professionals oansletten wurdt op 'e stroomfoarsjenning.
- Soargje derfoar dat de lader droech is en frij fan frjemde foarwerpen binnenin as er yn gebrûk is.
- Soargje derfoar dat obstakels mear as 0,5 meter fan 'e lofter- en rjochterkant fan' e lader ôf binne.
- Meitsje de loftynlaat en -útlaat elke 30 kalinderdagen skjin.
- Demontearje de lader net sels, oars kin in elektryske skok feroarsake wurde. De lader kin skansearre reitsje by it demontearjen en jo kinne dêrtroch miskien gjin tsjinst nei ferkeap krije.



