Numéro de modèle :
AGVC-24V100A-YT
Nom du produit :
Chargeur de batterie au lithium 24 V 100 A AGVC-24 V 100 A-YT pour véhicules à guidage automatique




VIDÉO PRODUIT
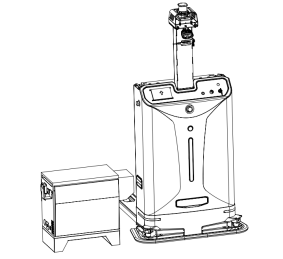
DESSIN D'INSTRUCTIONS

CARACTÉRISTIQUES ET AVANTAGES
-
Technologie de commutation douce PFC+LLC utilisée pour garantir un facteur de puissance élevé, de faibles harmoniques de courant, une faible ondulation de tension et de courant, une efficacité de conversion pouvant atteindre 94 % et une densité de puissance élevée du module.
01 -
Grâce à la fonction de communication CAN, il peut communiquer avec le BMS de la batterie au lithium pour gérer intelligemment la charge de la batterie afin d'assurer une charge rapide et une durée de vie de la batterie plus longue.
02 -
Design ergonomique et interface utilisateur intuitive, avec écran LCD, panneau tactile, voyant LED et boutons. L'utilisateur peut consulter les informations de charge et l'état, ainsi qu'effectuer différentes opérations et réglages.
03 -
Avec protection contre les surcharges, les surtensions, les surintensités, les surchauffes, les courts-circuits, les pertes de phase d'entrée, les surtensions d'entrée, les sous-tensions d'entrée, les charges anormales de la batterie au lithium, ainsi que le diagnostic et l'affichage des problèmes de charge.
04 -
En mode automatique, la batterie se recharge automatiquement sans surveillance. Un mode manuel est également disponible.
05 -
Avec fonction télescopique ; prise en charge de la répartition sans fil, du positionnement infrarouge et de la communication CAN, WIFI ou filaire.
06 -
Répartition sans fil 2,4G, 4G ou 5,8G. Positionnement infrarouge en mode émission-réception, réflexion ou réflexion diffuse. Personnalisation possible de la brosse et de sa hauteur.
07 -
Large plage de tension d'entrée qui peut fournir à la batterie une charge stable et fiable sous une alimentation électrique instable.
08 -
Technologie télescopique intelligente permettant de charger l'AGV avec un port de charge sur le côté.
09 -
Capteur photoélectrique infrarouge de haute précision pour assurer un positionnement plus précis.
010 -
Capable de charger l'AGV avec le port de charge sur le côté, à l'avant ou en bas.
011 -
Communication sans fil pour permettre aux chargeurs AGV de communiquer et de connecter intelligemment les AGV. (un AGV vers un ou plusieurs chargeurs AGV, un chargeur AGV vers un ou plusieurs AGV)
012 -
Balai en alliage acier-carbone offrant une excellente conductivité électrique. Forte résistance mécanique, excellente isolation, grande résistance à la chaleur et à la corrosion.
013

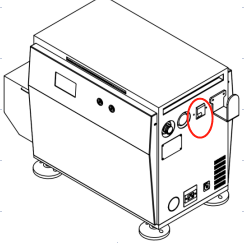
APPLICATION
Fournir une charge rapide, sûre et AUTOMATIQUE pour les AGV (véhicules à guidage automatique), y compris les chariots élévateurs AGV, les AGV de tri logistique, les AGV à traction latente, les robots de stationnement intelligents, les AGV à traction lourde dans les aéroports, les ports maritimes et les mines.






CARACTÉRISTIQUES
| MmodèleNon. | AGVC-24V100A-YT |
| NotéIentréeVtension | 220 VCA ± 15 % |
| SaisirVtensionRange | Monophasé à trois fils |
| SaisirCactuelRange | <16A |
| NotéOsortiePpuissance | 2,4 kW |
| NotéOsortieCactuel | 100A |
| SortirVtensionRange | 16 V CC-32 V CC |
| ActuelLimitAréglableRange | 5A-100A |
| CulminerNoise | ≤1% |
| TensionRrégulationAprécision | ≤±0,5% |
| ActuelShareng | ≤±5% |
| Efficacité | Charge de sortie ≥ 50 %, lorsque nominale, l'efficacité globale ≥ 92 % ; |
| Charge de sortie < 50 %, lorsqu'elle est nominale, l'efficacité de l'ensemble de la machine est ≥ 99 % | |
| Protection | Court-circuit, surintensité, surtension, connexion inversée, courant inverse |
| Fréquence | 50 Hz - 60 Hz |
| Facteur de puissance (PF) | ≥ 0,99 |
| Distorsion de courant (HD1) | ≤ 5% |
| SaisirPprotection | Surtension, sous-tension, surintensité |
| FonctionnementEenvironnementCconditions | Intérieur |
| FonctionnementTtempérature | -20%~45℃, fonctionnement normal ; 45℃~65℃, réduction de la sortie ; au-dessus de 65℃, arrêt. |
| StockageTtempérature | -40℃- 75℃ |
| RelatifHhumidité | 0 – 95% |
| Altitude | ≤2000 m de sortie à pleine charge ; >2000m l'utiliser conformément aux dispositions du 5.11.2 dans GB/T389.2-1993. |
| DiélectriqueSforce
| ENTRÉE-SORTIE : 2800 VCC/10 mA/1 min |
| EN COQUE : 2800 V CC/10 mA/1 min | |
| BOÎTE EXTÉRIEURE : 2 800 VCC/10 mA/1 min | |
| Dimensions etWhuit | |
| Dimensions (tout-en-un)) | 530(H)×580(L)×390(P) |
| FiletWhuit | 35 kg |
| Degré dePprotection | IP20 |
| Autres | |
| BMSCcommunicationMméthode | Communication CAN |
| BMSCconnexionMméthode | CAN-WIFI ou contact physique des modules CAN sur l'AGV et le chargeur |
| Expédition CcommunicationMméthode | Modbus TCP, Modbus AP |
| Expédition CconnexionMméthode | Modbus-wifi ou Ethernet |
| Bandes WIFI | 2,4G, 4G ou 5,8G |
| Mode de démarrage de la charge | Infrarouge, Modbus, CAN-WIFI |
| AGVBrosse Pparamètres | Suivez la norme AiPower ou les dessins fournis par les clients |
| Structure deCplus lourd | Tout en un |
| ChargementMméthode | Brosse télescopique |
| Méthode de refroidissement | Refroidissement par air pulsé |
| TélescopiqueCoup de pinceau | 200 MM |
| Bon Ddistancepour Ppositionnement | 185MM-325MM |
| Hauteur à partir deAGVCentre du pinceau vers le Grond | 90MM-400MM; Personnalisation disponible |
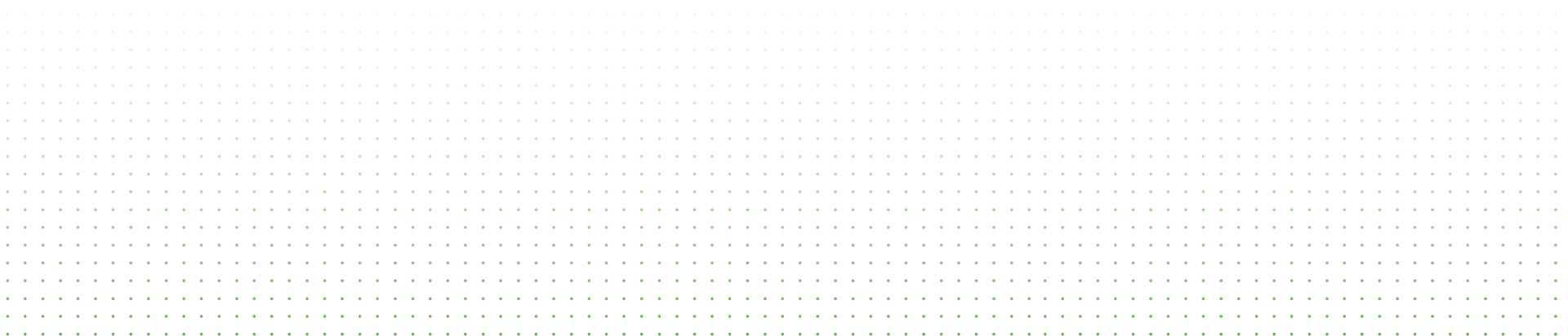
GUIDE D'INSTALLATION
Déballez la caisse en bois. Veuillez utiliser des outils professionnels.
2. Utilisez un tournevis pour démonter les vis au bas de la boîte en bois qui fixent le chargeur EV.

Placez le chargeur à l'horizontale et ajustez les pieds pour assurer une position de charge optimale. Assurez-vous que les obstacles se trouvent à plus de 0,5 m des côtés gauche et droit du chargeur.

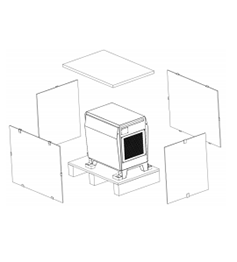
Si l'interrupteur du chargeur est éteint, branchez la fiche du chargeur à la prise en fonction du nombre de phases. Veuillez faire appel à des professionnels.

À faire et à ne pas faire lors de l'installation
- Placez le chargeur à l'horizontale. Posez-le sur un support résistant à la chaleur. Ne le posez PAS à l'envers. Ne l'inclinez PAS.
- Le chargeur nécessite un espace suffisant pour le refroidissement. Assurez-vous que la distance entre l'entrée d'air et le mur est supérieure à 300 mm et que la distance entre le mur et la sortie d'air est supérieure à 1 000 mm.
- Le chargeur produit de la chaleur pendant son fonctionnement. Pour un refroidissement optimal, veillez à ce qu'il fonctionne dans un environnement où la température est comprise entre -20 % et 45 °C.
- Assurez-vous que des objets étrangers tels que des fibres, des morceaux de papier, des copeaux de bois ou des fragments de métal ne pénètrent PAS à l'intérieur du chargeur, sinon un incendie pourrait se produire.
- Après avoir connecté l'alimentation électrique, NE TOUCHEZ PAS la brosse ou l'électrode de la brosse pour éviter tout risque de choc électrique.
- La borne de terre DOIT être bien mise à la terre pour éviter tout choc électrique ou incendie.

GUIDE D'UTILISATION
-
01
Allumez l'interrupteur pour mettre la machine en mode veille.
-
02
2. L'AGV enverra un signal demandant la charge lorsque l'AGV n'a pas assez de puissance.
-
03
L'AGV se déplacera lui-même vers le chargeur et effectuera le positionnement avec le chargeur.
-
04
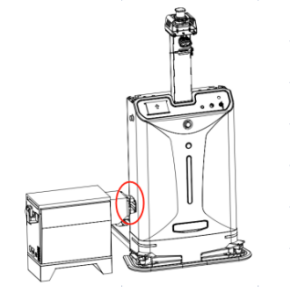
Une fois le positionnement bien effectué, le chargeur insérera automatiquement sa brosse dans le port de charge de l'AGV pour charger l'AGV.
-
05
Une fois la charge terminée, la brosse du chargeur se rétracte automatiquement et le chargeur repasse en mode veille.

À faire et à ne pas faire en fonctionnement
- Assurez-vous que le chargeur ne sera connecté à l'alimentation électrique que sous la direction de professionnels.
- Assurez-vous que le chargeur est sec et exempt de corps étrangers à l'intérieur lorsqu'il est utilisé.
- Assurez-vous que les obstacles se trouvent à plus de 0,5 m du côté gauche et droit du chargeur.
- Nettoyez l’entrée et la sortie d’air tous les 30 jours calendaires.
- Ne démontez pas le chargeur vous-même, vous risqueriez de subir un choc électrique. Le chargeur pourrait être endommagé lors du démontage et vous pourriez ne pas bénéficier du service après-vente.



