Mudeli nr.:
AGVC-24V100A-YT
Toote nimi:
24V100A liitiumaku laadija AGVC-24V100A-YT automaatselt juhitavatele sõidukitele




TOOTEVIDEO
JUHENDJOONIS

OMADUSED JA EELISED
-
PFC+LLC pehme lülitustehnoloogia tagab kõrge võimsusteguri, madala vooluharmoonilise, väikese pinge ja voolu pulsatsiooni, kuni 94% muundamise efektiivsuse ja mooduli suure võimsustiheduse.
01 -
CAN-kommunikatsiooni funktsiooni abil saab see suhelda liitiumaku BMS-iga, et nutikalt hallata aku laadimist, tagades kiire laadimise ja pikema aku tööea.
02 -
Ergonoomiline välimus ja kasutajasõbralik kasutajaliides, sh LCD-ekraan, puutepaneel, LED-märgutuli ja nupud. Lõppkasutajad näevad laadimise teavet ja olekut ning saavad teha erinevaid toiminguid ja seadeid.
03 -
Ülelaadimise, ülepinge, ülevoolu, ületemperatuuri, lühise, sisendfaasi kadumise, sisendi ülepinge, sisendi alapinge, liitiumaku ebanormaalse laadimise kaitse ning laadimisprobleemide diagnoosimise ja kuvamisega.
04 -
Automaatrežiimis saab see laadida automaatselt ilma inimese järelevalveta. Sellel on ka käsitsirežiim.
05 -
Teleskoopfunktsiooniga; Toetab traadita dispetšerimist, infrapunapositsioneerimist ning CAN-, WIFI- või juhtmega sidet.
06 -
2.4G, 4G või 5.8G traadita dispetšer. Infrapuna positsioneerimine saatmise-vastuvõtmise, peegelduse või hajuspeegelduse viisil. Harja ja harja kõrguse kohandamine on võimalik.
07 -
Lai sisendpinge vahemik, mis tagab aku stabiilse ja usaldusväärse laadimise ebastabiilse toiteallika korral.
08 -
Nutikas teleskooptehnoloogia AGV laadimiseks küljel asuva laadimispordi abil.
09 -
Täpsem infrapunane fotoelektriline andur täpsema positsioneerimise tagamiseks.
010 -
AGV laadimiseks sobib laadimisport küljel, ees või all.
011 -
Traadita side, et AGV laadijad saaksid nutikalt omavahel suhelda ja AGV-sid ühendada. (üks AGV ühe või mitme AGV laadijaga, üks AGV laadija ühe või mitme AGV-ga)
012 -
Terasest ja süsinikust sulamist hari suurepärase elektrijuhtivusega. Tugev mehaaniline tugevus, suurepärane isolatsioon, suurepärane kuumakindlus ja kõrge korrosioonikindlus.
013

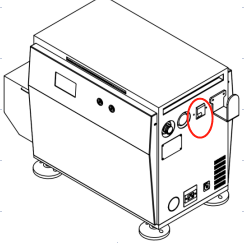
TAOTLUS
Pakkuda kiiret, ohutut ja AUTOMAATSET laadimist AGV-dele (automaatselt juhitavatele sõidukitele), sealhulgas AGV-kahveltõstukitele, logistika sorteerimis- ja tõsteseadmetele, latentse veojõuga AGV-dele, intelligentsetele parkimisrobotitele, raskeveokite AGV-dele lennujaamades, sadamates ja kaevandustes.






SPETSIFIKATSIOONID
| ModelEi. | AGVC-24V100A-YT |
| HinnatudIsisendVvoltage | 220 V vahelduvvool ± 15% |
| SisendVvoltageRingel | Ühefaasiline kolmejuhtmeline |
| SisendCvoolRingel | <16A |
| HinnatudOväljundPvõim | 2,4 kW |
| HinnatudOväljundCvool | 100A |
| VäljundVvoltageRingel | 16–32 V alalisvool |
| PraeguneLjäljendamaAreguleeritavRingel | 5A–100A |
| TippNoise | ≤1% |
| PingeRregulatsioonAtäpsus | ≤±0,5% |
| PraeguneSjahipidamine | ≤±5% |
| Tõhusus | Väljundkoormus ≥ 50%, nimivõimsusel on üldine efektiivsus ≥ 92%; |
| Väljundkoormus <50%, nimiväärtuse korral on kogu masina efektiivsus ≥99% | |
| Kaitse | Lühis, ülevool, ülepinge, pöördühendus, pöördvool |
| Sagedus | 50Hz–60Hz |
| Võimsustegur (PF) | ≥0,99 |
| Voolu moonutus (HD1) | ≤5% |
| SisendPkaitse | Ülepinge, alapinge, ülevool |
| TöötamineEkeskkondCtingimused | Siseruumides |
| TöötamineTtemperatuur | -20% ~ 45 ℃, normaalne töö; 45 ℃ ~ 65 ℃, väljundvõimsus väheneb; üle 65 ℃, väljalülitus. |
| LadustamineTtemperatuur | -40 ℃ - 75 ℃ |
| SugulaneHniiskus | 0–95% |
| Kõrgus merepinnast | ≤2000m täiskoormuse väljund; >2000 m kasutage seda vastavalt GB/T389.2-1993 punkti 5.11.2 sätetele. |
| DielektrilineStugevus
| Sisse-välja: 2800 V alalisvool/10 mA/1 min |
| KORPUSES: 2800 V alalisvool/10 mA/1 min | |
| VÄLISKOOR: 2800 V alalisvool/10 mA/1 min | |
| Mõõtmed jaWkaheksa | |
| Mõõtmed (kõik-ühes)) | 530 (K) × 580 (L) × 390 (S) |
| NetoWkaheksa | 35 kg |
| KraadPkaitse | IP20 |
| Muus | |
| BMSCkommunikatsioonMmeetod | CAN-side |
| BMSCühendusMmeetod | CAN-WIFI või CAN-moodulite füüsiline kontakt AGV ja laadija vahel |
| C väljastaminekommunikatsioonMmeetod | Modbus TCP, Modbus AP |
| C väljastamineühendusMmeetod | Modbus-wifi või Ethernet |
| WiFi-sagedusalad | 2.4G, 4G või 5.8G |
| Laadimise alustamise viis | Infrapuna, Modbus, CAN-WIFI |
| AGVPintsel Pparameetrid | Järgige AiPoweri standardit või klientide esitatud jooniseid |
| StruktuurCveok | Kõik ühes |
| LaadimineMmeetod | Harja teleskoop |
| Jahutusmeetod | Sundõhuga jahutus |
| TeleskoopilinePintslitõmme | 200 mm |
| Hea DseisukordP jaokspositsioneerimine | 185–325 mm |
| Kõrgus alatesAGVPintsli keskpunkt G-niümmargune | 90MM-400MM; Kohandamine saadaval |
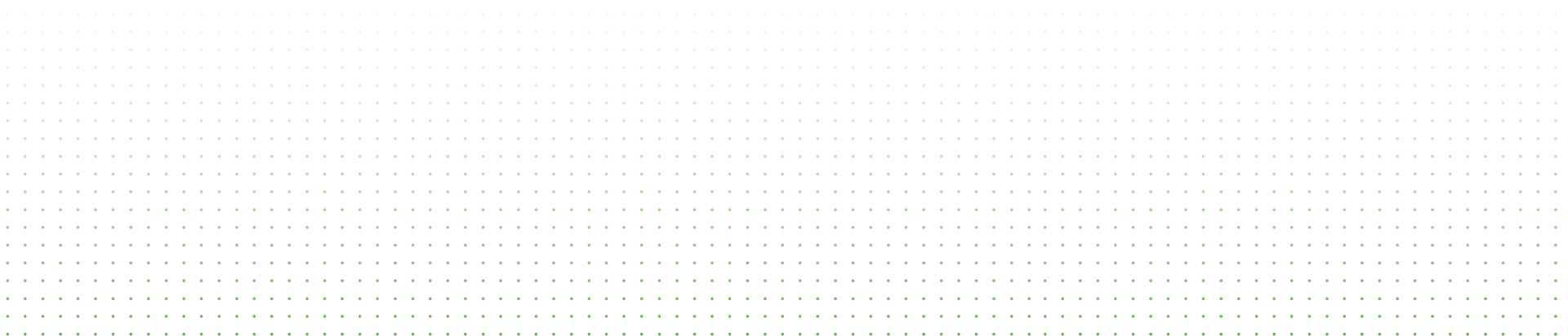
PAIGALDUSJUHEND
Pakkige puidust kast lahti. Palun kasutage professionaalseid tööriistu.
2. Kasutage kruvikeerajat, et lahti võtta puidust karbi põhjas olevad kruvid, mis kinnitavad elektriauto laadija.

Asetage laadija horisontaalasendisse ja reguleerige jalgu, et tagada õige laadimisasend. Veenduge, et takistused oleksid laadija vasakust ja paremast küljest rohkem kui 0,5 m kaugusel.

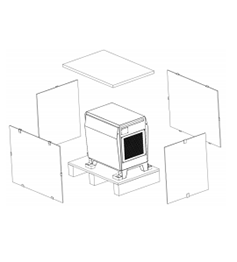
Kui laadija lüliti on välja lülitatud, ühendage laadija pistik pistikupesaga vastavalt faaside arvule. Palun laske see töö teha spetsialistidel.

Paigaldamise ajal tehtavad ja keelatavad toimingud
- Asetage laadija horisontaalasendisse. Asetage laadija kuumakindlale pinnale. ÄRGE pange seda tagurpidi. ÄRGE tehke seda kaldu.
- Laadijal on vaja piisavalt jahutusruumi. Veenduge, et õhu sisselaskeava ja seina vaheline kaugus on üle 300 mm ning seina ja õhu väljalaskeava vaheline kaugus on üle 1000 mm.
- Laadija tekitab töötamise ajal soojust. Hea jahutuse tagamiseks veenduge, et laadija töötaks keskkonnas, mille temperatuur on -20% ~ 45 ℃.
- Veenduge, et võõrkehad, näiteks kiud, paberitükid, puidulaastud või metallitükid, EI satuks laadijasse, vastasel juhul võib tekkida tulekahju.
- Pärast toiteallikaga ühendamist ÄRGE puudutage harja ega harja elektroodi, et vältida elektrilöögi ohtu.
- Maandusklemm PEAB olema hästi maandatud, et vältida elektrilööki või tulekahju.

KASUTUSJUHEND
-
01
Lülitage lüliti sisse, et masin ooterežiimile lülitada.
-
02
2.AGV saadab signaali, mis küsib laadimist, kui AGV-l pole piisavalt energiat.
-
03
AGV liigub ise laadija juurde ja positsioneerib selle laadijaga.
-
04
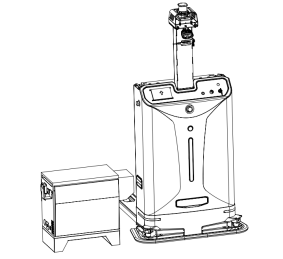
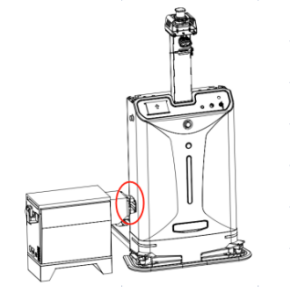
Pärast positsioneerimist sirutab laadija automaatselt oma harja AGV laadimisporti, et AGV-d laadida.
-
05
Pärast laadimise lõppu tõmbub laadija hari automaatselt sisse ja laadija läheb uuesti ooterežiimi.

Mida teha ja mida mitte teha
- Veenduge, et laadija ühendatakse toiteallikaga ainult spetsialistide juhendamisel.
- Veenduge, et laadija on kasutamise ajal kuiv ja võõrkehadest vaba.
- Veenduge, et takistused oleksid laadija vasakust ja paremast küljest rohkem kui 0,5 m kaugusel.
- Puhastage õhu sisse- ja väljalaskeava iga 30 kalendripäeva järel.
- Ärge võtke laadijat ise lahti, vastasel juhul võite saada elektrilöögi. Laadija võib lahtivõtmise ajal kahjustuda ja te ei pruugi seetõttu saada müügijärgset teenindust.



