N.º de modelo:
AGVC-24V100A-YT
Nombre del producto:
Cargador de batería de litio de 24 V y 100 A AGVC-24V100A-YT para vehículos de guiado automático




VIDEO DEL PRODUCTO
DIBUJO DE INSTRUCCIONES

CARACTERÍSTICAS Y VENTAJAS
-
Se utiliza tecnología de conmutación suave PFC+LLC para garantizar un alto factor de potencia, bajos armónicos de corriente, pequeña ondulación de voltaje y corriente, una eficiencia de conversión de hasta el 94 % y una alta densidad de potencia del módulo.
01 -
Con la función de comunicación CAN, puede comunicarse con el BMS de la batería de litio para administrar de forma inteligente la carga de la batería para garantizar una carga rápida y una mayor vida útil de la batería.
02 -
Diseño ergonómico e interfaz de usuario intuitiva, con pantalla LCD, panel táctil, luz LED indicadora y botones. Los usuarios pueden ver la información y el estado de carga, así como realizar diversas operaciones y configuraciones.
03 -
Con protección contra sobrecarga, sobretensión, sobrecorriente, sobretemperatura, cortocircuito, pérdida de fase de entrada, sobretensión de entrada, subtensión de entrada, carga anormal de batería de litio y diagnóstico y visualización de problemas de carga.
04 -
En modo automático, se carga automáticamente sin supervisión. También dispone de modo manual.
05 -
Con función telescópica; Admite despacho inalámbrico, posicionamiento por infrarrojos y comunicación CAN, WIFI o por cable.
06 -
Despacho inalámbrico de 2.4G, 4G o 5.8G. Posicionamiento infrarrojo en modo transmisión-recepción, reflexión o reflexión difusa. Personalización del cepillo y su altura.
07 -
Amplio rango de voltaje de entrada que puede proporcionar a la batería una carga estable y confiable bajo una fuente de alimentación inestable.
08 -
Tecnología telescópica inteligente para poder cargar AGV con puerto de carga en el lateral.
09 -
Sensor fotoeléctrico infrarrojo de alta precisión para garantizar un posicionamiento más preciso.
010 -
Capaz de cargar para AGV con puerto de carga en el lateral, en la parte delantera o en la parte inferior.
011 -
Comunicación inalámbrica para hacer que los cargadores AGV se comuniquen y conecten de forma inteligente los AGV. (un AGV a uno o más cargadores AGV, un cargador AGV a uno o más AGV)
012 -
Cepillo de aleación de acero y carbono con alta conductividad eléctrica. Gran resistencia mecánica, excelente aislamiento, gran resistencia al calor y alta resistencia a la corrosión.
013

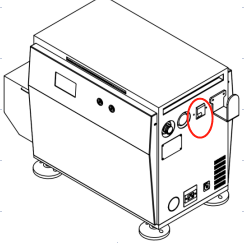
SOLICITUD
Proporcionar una carga rápida, segura y AUTOMÁTICA para AGV (vehículos guiados automáticamente), incluidas carretillas elevadoras AGV, AGV con gatos de clasificación logística, AGV de tracción latente, robots de estacionamiento inteligentes, AGV de tracción de servicio pesado en aeropuertos, puertos marítimos y minas.






PRESUPUESTO
| MmodeloNo. | AGVC-24V100A-YT |
| CalificadoIentradaVvoltaje | 220 V CA ± 15 % |
| AporteVvoltajeRángel | Monofásico de tres hilos |
| AporteCactualRángel | <16A |
| CalificadoOsalidaPpoder | 2,4 kW |
| CalificadoOsalidaCactual | 100A |
| ProducciónVvoltajeRángel | 16 VCC-32 VCC |
| ActualLimitarAajustableRángel | 5A-100A |
| CimaNOise | ≤1% |
| VoltajeRregulaciónAprecisión | ≤±0,5% |
| ActualScompartiendo | ≤±5% |
| Eficiencia | Carga de salida ≥ 50%, cuando está nominal, la eficiencia general ≥ 92%; |
| Carga de salida <50%, cuando se califica, la eficiencia de toda la máquina es ≥99% | |
| Protección | Cortocircuito, sobrecorriente, sobretensión, conexión inversa, corriente inversa |
| Frecuencia | 50 Hz - 60 Hz |
| Factor de potencia (FP) | ≥0,99 |
| Distorsión de corriente (HD1) | ≤5% |
| AportePprotección | Sobretensión, subtensión, sobrecorriente |
| LaboralEmedio ambienteCcondiciones | Interior |
| LaboralTtemperatura | -20%~45℃, funcionando normalmente; 45℃~65℃, reduciendo la salida; por encima de 65℃, apagado. |
| AlmacenamientoTtemperatura | -40℃- 75℃ |
| RelativoHhumedad | 0 – 95% |
| Altitud | ≤2000m de salida de carga completa; >2000m Úselo de acuerdo con las disposiciones de 5.11.2 en GB/T389.2-1993. |
| DieléctricoSfuerza
| ENTRADA-SALIDA: 2800 VCC/10 mA/1 min |
| EN LA CARCASA: 2800 VCC/10 mA/1 min | |
| CARCASA EXTERIOR: 2800 VCC/10 mA/1 min | |
| Dimensiones yWocho | |
| Dimensiones (todo en uno)) | 530 (alto) × 580 (ancho) × 390 (profundidad) |
| NetoWocho | 35 kg |
| Grado dePprotección | IP20 |
| Otros | |
| Sistema de gestión de edificiosCcomunicaciónMmétodo | Comunicación CAN |
| Sistema de gestión de edificiosCConexiónMmétodo | CAN-WIFI o contacto físico de módulos CAN en AGV y cargador |
| Despacho CcomunicaciónMmétodo | Modbus TCP, Modbus AP |
| Despacho CConexiónMmétodo | Modbus-wifi o Ethernet |
| Bandas WIFI | 2.4G, 4G o 5.8G |
| Modo de inicio de carga | Infrarrojos, Modbus, CAN-WIFI |
| Vehículos guiados por guiado (AGV)Pincel Pparámetros | Siga el estándar AiPower o los dibujos proporcionados por los clientes |
| Estructura deCmás pesado | Todo en uno |
| CargandoMmétodo | Cepillo telescópico |
| Método de enfriamiento | Refrigeración por aire forzado |
| TelescópicoTrazo de pincel | 200 mm |
| Buena Ddistanciapara Pposicionamiento | 185MM-325MM |
| Altura desdeVehículos guiados por guiado (AGV)Centro del pincel hacia la Gredondo | 90MM-400MM; Personalización disponible |
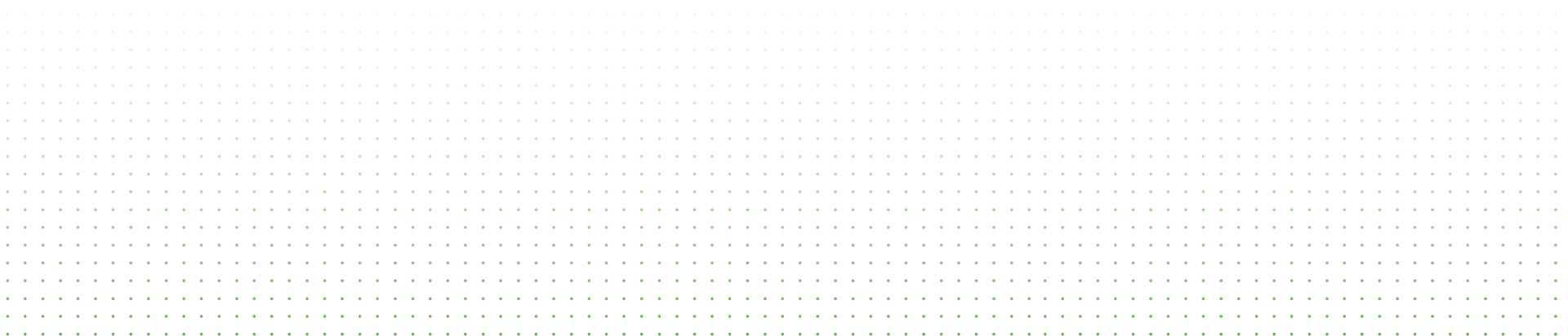
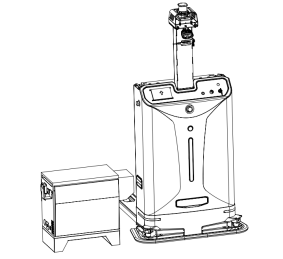
GUÍA DE INSTALACIÓN
Desembale la caja de madera. Utilice herramientas profesionales.
2. Utilice un destornillador para desmontar los tornillos de la parte inferior de la caja de madera que fijan el cargador EV.

Coloque el cargador en horizontal y ajuste las patas para asegurar la posición de carga correcta. Asegúrese de que no haya obstáculos a más de 0,5 m de los lados izquierdo y derecho del cargador.

Con el cargador apagado, conecte el enchufe a la toma de corriente según el número de fase. Solicite esta tarea a un profesional.

Qué hacer y qué no hacer durante la instalación
- Coloque el cargador horizontalmente. Colóquelo sobre un soporte resistente al calor. NO lo coloque boca abajo. NO lo incline.
- El cargador necesita suficiente espacio para enfriarse. Asegúrese de que la distancia entre la entrada de aire y la pared sea superior a 300 mm, y entre la pared y la salida de aire superior a 1000 mm.
- El cargador se calentará al funcionar. Para garantizar una buena refrigeración, asegúrese de que funcione en un entorno con una temperatura entre -20 % y 45 °C.
- Asegúrese de que objetos extraños como fibras, trozos de papel, virutas de madera o fragmentos de metal NO entren en el cargador, ya que podría producirse un incendio.
- Después de conectarlo a la fuente de alimentación, NO toque el cepillo ni el electrodo del cepillo para evitar el riesgo de descarga eléctrica.
- La terminal de tierra DEBE estar bien conectada a tierra para evitar descargas eléctricas o incendios.

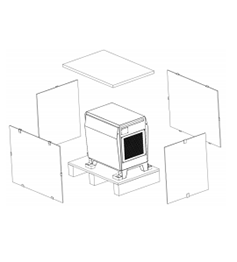
GUÍA DE OPERACIÓN
-
01
Encienda el interruptor para poner la máquina en modo de espera.
-
02
2. El AGV enviará una señal solicitando carga cuando el AGV no tenga suficiente energía.
-
03
El AGV se moverá por sí solo hasta el cargador y realizará el posicionamiento junto con éste.
-
04
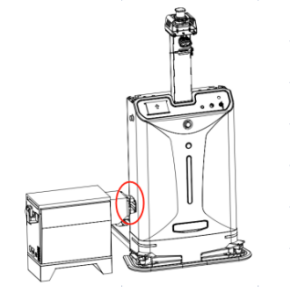
Una vez realizado el posicionamiento, el cargador insertará automáticamente su cepillo en el puerto de carga del AGV para cargarlo.
-
05
Una vez finalizada la carga, el cepillo del cargador se retraerá automáticamente y el cargador pasará nuevamente al modo de espera.

Qué hacer y qué no hacer en la operación
- Asegúrese de que sólo bajo la guía de profesionales se conecte el cargador a la fuente de alimentación.
- Asegúrese de que el cargador esté seco y libre de objetos extraños en su interior cuando esté en uso.
- Asegúrese de que los obstáculos estén a más de 0,5 m del lado izquierdo y derecho del cargador.
- Limpie la entrada y salida de aire cada 30 días calendario.
- No desmonte el cargador usted mismo, ya que podría sufrir una descarga eléctrica. El cargador podría dañarse durante el desmontaje y, por lo tanto, podría perder el servicio posventa.



