Modelnr.:
AGVC-24V100A-YT
Produktnavn:
24V100A litiumbatterioplader AGVC-24V100A-YT til automatisk guidede køretøjer




PRODUKTVIDEO
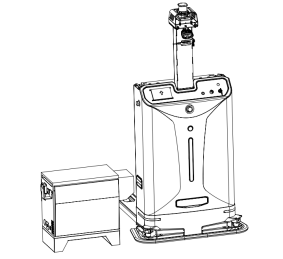
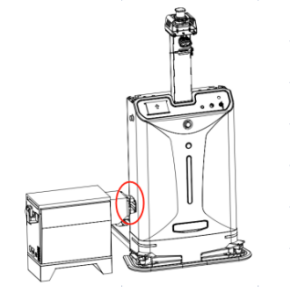
INSTRUKTIONSTEGNING

EGENSKABER OG FORDELE
-
PFC+LLC soft switching-teknologi, der bruges til at sikre høj effektfaktor, lave strømharmoniske, lille spændings- og strømrippel, konverteringseffektivitet på op til 94 % og høj moduleffekttæthed.
01 -
Med CAN-kommunikationsfunktionen kan den kommunikere med litiumbatteriets BMS for intelligent at styre batteriopladning og sikre hurtig opladning og længere batterilevetid.
02 -
Ergonomisk design og brugervenlig brugergrænseflade, inklusive LCD-display, berøringspanel, LED-indikatorlampe og knapper. Slutbrugere kan se opladningsoplysninger og status samt udføre forskellige handlinger og indstillinger.
03 -
Med beskyttelse mod overopladning, overspænding, overstrøm, overtemperatur, kortslutning, fasetab på indgangssiden, overspænding på indgangssiden, underspænding på indgangssiden, unormal opladning af lithiumbatterier samt diagnose og visning af opladningsproblemer.
04 -
I automatisk tilstand kan den oplades automatisk uden opsyn af en person. Den har også manuel tilstand.
05 -
Med teleskopfunktion; Understøtter trådløs forsendelse, infrarød positionering og CAN-, WIFI- eller kablet kommunikation.
06 -
2,4G, 4G eller 5,8G trådløs forsendelse. Infrarød positionering i sende-modtage, reflektion eller diffus reflektion. Tilpasning mulig for børste og børstens højde.
07 -
Bredt indgangsspændingsområde, der kan give batteriet stabil og pålidelig opladning under ustabil strømforsyning.
08 -
Smart teleskopteknologi til opladning af AGV'er med opladningsport på siden.
09 -
Højpræcisions infrarød fotoelektrisk sensor for at sikre mere præcis positionering.
010 -
Kan oplades til AGV med opladningsport på siden, foran eller i bunden.
011 -
Trådløs kommunikation for smart at få AGV-opladere til at kommunikere og forbinde AGV. (én AGV til en eller flere AGV-opladere, én AGV-oplader til en eller flere AGV'er)
012 -
Børste i stål-kulstoflegering med stor elektrisk ledningsevne. Stærk mekanisk styrke, fremragende isolering, stor varmebestandighed og høj korrosionsbestandighed.
013

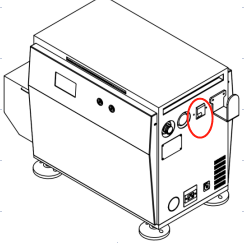
ANVENDELSE
At tilbyde hurtig, sikker og AUTOMATISK opladning af AGV'er (Automated Guided Vehicles), herunder AGV-gaffeltrucks, AGV'er med sortering og donkraft, AGV'er med latent trækkraft, intelligente parkeringsrobotter og tunge AGV'er med trækkraft i lufthavne, havne og miner.






SPECIFIKATIONER
| MmodelIngen. | AGVC-24V100A-YT |
| BedømtInputValderdom | 220VAC ± 15% |
| InputValderdomRengel | Enfaset tretråds |
| InputCnuværendeRengel | <16A |
| BedømtOudgangPkraft | 2,4 kW |
| BedømtOudgangCnuværende | 100A |
| ProduktionValderdomRengel | 16VDC-32VDC |
| StrømLimitereAjusterbarRengel | 5A-100A |
| SpidsNoise | ≤1% |
| SpændingRreguleringAnøjagtighed | ≤±0,5% |
| StrømSharing | ≤±5% |
| Effektivitet | Udgangsbelastning ≥ 50%, ved nominel drift er den samlede virkningsgrad ≥ 92%; |
| Udgangsbelastning <50%, når den er nominel, er hele maskinens effektivitet ≥99% | |
| Beskyttelse | Kortslutning, overstrøm, overspænding, omvendt forbindelse, omvendt strøm |
| Frekvens | 50Hz-60Hz |
| Effektfaktor (PF) | ≥0,99 |
| Strømforvrængning (HD1) | ≤5% |
| InputPbeskyttelse | Overspænding, underspænding, overstrøm |
| ArbejderEmiljøCbetingelser | Indendørs |
| ArbejderTtemperatur | -20%~45℃, normal drift; 45℃~65℃, reduceret output; over 65℃, nedlukning. |
| OpbevaringTtemperatur | -40℃- 75℃ |
| RelativHfugtighed | 0 – 95% |
| Højde | ≤2000m fuld belastningsudgang; >2000m skal det anvendes i overensstemmelse med bestemmelserne i 5.11.2 i GB/T389.2-1993. |
| DielektriskSstyrke
| IND-UD: 2800VDC/10mA/1Min |
| IN-SHELL: 2800VDC/10mA/1Min | |
| UDENDØRSSKAL: 2800VDC/10mA/1Min | |
| Dimensioner ogWotte | |
| Dimensioner (alt-i-en)) | 530 (H) × 580 (B) × 390 (D) |
| NetWotte | 35 kg |
| Grad afPbeskyttelse | IP20 |
| Andres | |
| BMSCkommunikationMmetode | CAN-kommunikation |
| BMSCforbindelseMmetode | CAN-WIFI eller fysisk kontakt mellem CAN-moduler ved AGV og oplader |
| Forsendelse CkommunikationMmetode | Modbus TCP, Modbus AP |
| Forsendelse CforbindelseMmetode | Modbus-wifi eller Ethernet |
| WIFI-bånd | 2,4G, 4G eller 5,8G |
| Tilstand til start af opladning | Infrarød, Modbus, CAN-WIFI |
| AGVBørste Pparametre | Følg AiPower-standarden eller tegninger leveret af kunderne |
| Struktur afCharger | Alt i én |
| OpladningMmetode | Børste Teleskopisk |
| Kølemetode | Tvungen luftkøling |
| TeleskopiskPenselstrøg | 200MM |
| God Dafstandtil Ppositionering | 185MM-325MM |
| Højde fraAGVBørstecenter til Grund | 90MM-400MM; Tilpasning mulig |
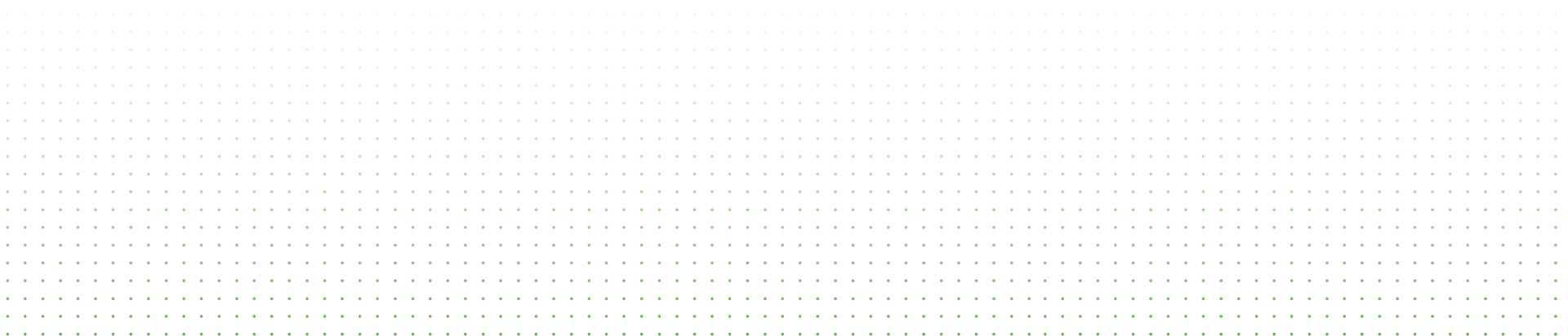
INSTALLATIONSVEJLEDNING
Pak trækassen ud. Brug venligst professionelle værktøjer.
2. Brug en skruetrækker til at afmontere skruerne i bunden af trækassen, der fastgør elbilsopladeren.

Placer opladeren vandret, og juster benene for at sikre den korrekte opladningsposition. Sørg for, at der er forhindringer mere end 0,5 m væk fra venstre og højre side af opladeren.

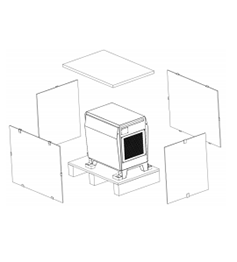
Hvis opladerens kontakt er slukket, skal opladerens stik tilsluttes stikkontakten i henhold til antallet af faser. Bed venligst fagfolk om at udføre dette arbejde.

Hvad du bør og ikke bør gøre ved installation
- Placer opladeren vandret. Placer opladeren på noget, der er varmebestandigt. Stil den IKKE på hovedet. Lad den IKKE hælde.
- Opladeren skal have tilstrækkelig plads til køling. Sørg for, at afstanden mellem luftindtaget og væggen er mere end 300 mm, og at afstanden mellem væggen og luftudløbet er mere end 1000 mm.
- Opladeren vil producere varme under drift. For at sikre god afkøling skal du sørge for, at opladeren fungerer i et miljø, hvor temperaturen er -20%~45℃.
- Sørg for, at fremmedlegemer såsom fibre, papirstykker, træspåner eller metalfragmenter IKKE kommer ind i opladeren, da der ellers kan opstå brand.
- Efter tilslutning til strømforsyningen må du IKKE røre ved børsten eller børsteelektroden for at undgå risiko for elektrisk stød.
- Jordterminalen SKAL være godt jordet for at forhindre elektrisk stød eller brand.

BRUGERVEJLEDNING
-
01
Tænd for kontakten for at sætte maskinen i standbytilstand.
-
02
2. AGV'en sender et signal, der beder om opladning, når AGV'en ikke har nok strøm.
-
03
AGV'en vil køre hen til opladeren af sig selv og positionere med opladeren.
-
04
Når positioneringen er korrekt udført, stikker opladeren automatisk sin børste ud i AGV'ens opladningsport for at oplade AGV'en.
-
05
Når opladningen er færdig, trækkes opladerens børste automatisk tilbage, og opladeren går i standbytilstand igen.

Hvad du bør og ikke bør gøre i drift
- Sørg for, at opladeren kun tilsluttes strømforsyningen under vejledning af fagfolk.
- Sørg for, at opladeren er tør og fri for fremmedlegemer indeni, når den er i brug.
- Sørg for, at der er mere end 0,5 m forhindringer fra venstre og højre side af opladeren.
- Rengør luftindtag og -udtag hver 30. kalenderdag.
- Adskil ikke opladeren selv, da det kan forårsage elektrisk stød. Opladeren kan blive beskadiget under adskillelsen, og du kan muligvis ikke få gavn af eftersalgsservice på grund af dette.



