Rhif Model:
AGVC-24V100A-YT
Enw'r Cynnyrch:
Gwefrydd Batri Lithiwm 24V100A AGVC-24V100A-YT ar gyfer Cerbydau Tywys Awtomataidd




FIDEO CYNHYRCHION
LLUN CYFARWYDDIADAU

NODWEDDION A MANTEISION
-
Defnyddir technoleg newid meddal PFC+LLC i sicrhau ffactor pŵer uchel, harmonigau cerrynt isel, crychdonni foltedd a cherrynt bach, effeithlonrwydd trosi mor uchel â 94% a dwysedd uchel o bŵer modiwl.
01 -
Gyda nodwedd cyfathrebu CAN, gall gyfathrebu â BMS batri lithiwm i reoli gwefru batri yn ddeallus i sicrhau gwefru cyflym a bywyd batri hirach.
02 -
Dyluniad ergonomig o ran ymddangosiad a rhyngwyneb defnyddiwr hawdd ei ddefnyddio, gan gynnwys arddangosfa LCD, panel cyffwrdd, golau a botymau dangos LED. Gall defnyddwyr terfynol weld gwybodaeth a statws gwefru, gwneud gwahanol weithrediadau a gosodiadau.
03 -
Gyda diogelwch rhag gor-wefru, gor-foltedd, gor-gerrynt, gor-dymheredd, cylched fer, colli cyfnod mewnbwn, gor-foltedd mewnbwn, is-foltedd mewnbwn, gwefru annormal batri lithiwm, a diagnosis ac arddangos problemau gwefru.
04 -
O dan y modd awtomatig, gall wefru'n awtomatig heb gael ei oruchwylio gan berson. Mae ganddo fodd â llaw hefyd.
05 -
Gyda nodwedd telesgopig; Cefnogi anfon diwifr, lleoli is-goch a chyfathrebu CAN, WIFI neu â gwifrau.
06 -
Dosbarthu diwifr 2.4G, 4G neu 5.8G. Lleoli is-goch mewn ffordd trosglwyddo-derbyn, adlewyrchiad neu adlewyrchiad gwasgaredig. Addasu ar gael ar gyfer brwsh ac uchder y brwsh.
07 -
Ystod foltedd mewnbwn eang a all ddarparu gwefr sefydlog a dibynadwy i'r batri o dan gyflenwad pŵer ansefydlog.
08 -
Technoleg telesgopig glyfar i allu gwefru AGV gyda phorthladd gwefru ar yr ochr.
09 -
Synhwyrydd ffotodrydanol is-goch manwl gywir i sicrhau lleoliad mwy manwl gywir.
010 -
Yn gallu gwefru ar gyfer AGV gyda phorthladd gwefru ar yr ochr, ar y blaen neu ar y gwaelod.
011 -
Cyfathrebu diwifr i wneud gwefrwyr AGV yn glyfar i gyfathrebu a chysylltu AGV. (un AGV i un neu wefrwyr AGV gwahanol, un gwefrydd AGV i un neu AGV gwahanol)
012 -
Brwsh aloi dur-carbon gyda dargludedd trydanol gwych. Cryfder mecanyddol cryf, inswleiddio rhagorol, gwrthiant gwres gwych a gwrthiant cyrydiad uchel.
013

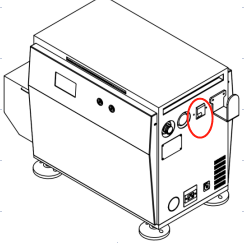
CAIS
Darparu gwefru cyflym, diogel ac AWTOMATIG ar gyfer AGV (Cerbydau Tywys Awtomataidd) gan gynnwys fforch godi AGV, AGVau sy'n jacio didoli logisteg, AGVau sy'n tynnu cudd, robotiaid parcio deallus, AGVau sy'n tynnu dyletswydd trwm mewn meysydd awyr, porthladdoedd a mwyngloddiau.






MANYLEBAU
| MmodelNa. | AGVC-24V100A-YT |
| GraddiedigImewnbwnVhenaint | 220VAC ± 15% |
| MewnbwnVhenaintRange | Un cam tair gwifren |
| MewnbwnCcyfredolRange | <16A |
| GraddiedigOallbwnPpŵer | 2.4KW |
| GraddiedigOallbwnCcyfredol | 100A |
| AllbwnVhenaintRange | 16VDC-32VDC |
| CyfredolLimiwneiddioAaddasadwyRange | 5A-100A |
| UchafbwyntNoise | ≤1% |
| FolteddRrheoleiddioAcywirdeb | ≤±0.5% |
| CyfredolSharing | ≤±5% |
| Effeithlonrwydd | Llwyth allbwn ≥ 50%, pan gaiff ei raddio, yr effeithlonrwydd cyffredinol ≥ 92%; |
| Llwyth allbwn <50%, pan gaiff ei raddio, mae effeithlonrwydd y peiriant cyfan yn ≥99% | |
| Amddiffyniad | Cylched fer, gor-gerrynt, gor-foltedd, cysylltiad gwrthdro, cerrynt gwrthdro |
| Amlder | 50Hz- 60Hz |
| Ffactor Pŵer (PF) | ≥0.99 |
| Ystumio Cerrynt (HD1) | ≤5% |
| MewnbwnPamddiffyniad | Gor-foltedd, is-foltedd, gor-gerrynt |
| GweithioEamgylcheddCamodau | Dan Do |
| GweithioTtymheredd | -20%~45℃, yn gweithio'n normal; 45℃~65℃, gan leihau'r allbwn; dros 65℃, cau i lawr. |
| StorioTtymheredd | -40℃- 75℃ |
| PerthynasHlleithder | 0 – 95% |
| Uchder | Allbwn llwyth llawn ≤2000m; >2000m defnyddiwch ef yn unol â darpariaethau 5.11.2 yn GB/T389.2-1993. |
| DielectrigScryfder
| MEWN-ALLAN: 2800VDC/10mA/1 Munud |
| YN-GREGYN: 2800VDC/10mA/1 Munud | |
| PLASGEN ALLANOL: 2800VDC/10mA/1 Munud | |
| Dimensiynau aWwyth | |
| Dimensiynau (popeth-mewn-un)) | 530(U)×580(L)×390(D) |
| NetWwyth | 35Kg |
| Gradd oPamddiffyniad | IP20 |
| Aralls | |
| BMSCcyfathrebuMdull | Cyfathrebu CAN |
| BMSCcysylltiadMdull | CAN-WIFI neu gyswllt corfforol modiwlau CAN yn yr AGV a'r gwefrydd |
| Anfon CcyfathrebuMdull | Modbus TCP, Modbus AP |
| Anfon CcysylltiadMdull | Modbus-wifi neu Ethernet |
| Bandiau WIFI | 2.4G, 4G neu 5.8G |
| Modd Cychwyn Gwefru | Is-goch, Modbus, CAN-WIFI |
| AGVBrws Pparamedrau | Dilynwch safon AiPower neu luniadau a ddarperir gan gwsmeriaid |
| StrwythurCharger | Popeth mewn un |
| Codi tâlMdull | Telesgopio Brwsh |
| Dull oeri | Oeri aer gorfodol |
| TelesgopigStrôc y Brwsh | 200MM |
| Da Dpellterar gyfer Plleoli | 185MM-325MM |
| Uchder oAGVCanol Brwsio i'r Gcrwn | 90MM-400MM; Addasu ar gael |
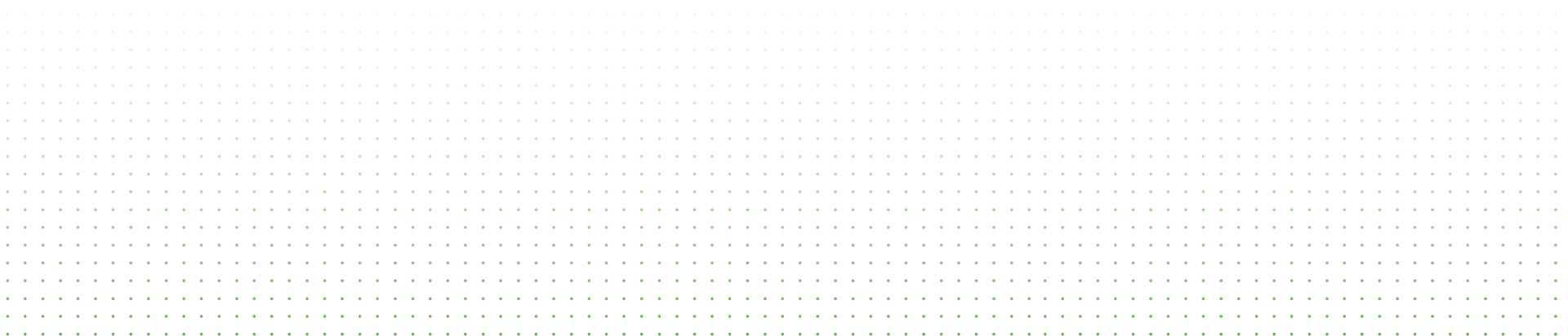
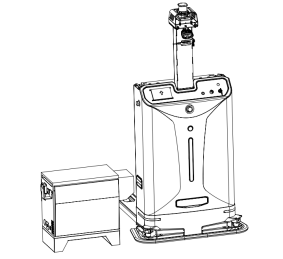
CANLLAW GOSOD
Dadbacio'r blwch pren. Defnyddiwch offer proffesiynol os gwelwch yn dda.
2. Defnyddiwch sgriwdreifer i ddadosod y sgriwiau ar waelod y blwch pren sy'n trwsio'r gwefrydd EV.

Rhowch y gwefrydd yn llorweddol ac addaswch y coesau i sicrhau'r safle gwefru cywir. Gwnewch yn siŵr bod rhwystrau mwy na 0.5M i ffwrdd o ochrau chwith a dde'r gwefrydd.

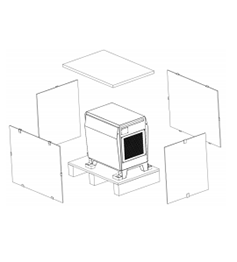
Ar yr amod bod switsh y gwefrydd i ffwrdd, cysylltwch blyg y gwefrydd â'r soced yn seiliedig ar nifer y cyfnodau. Gofynnwch i weithwyr proffesiynol wneud y gwaith hwn os gwelwch yn dda.

Pethau i'w Gwneud a Phethau i Beidio â'u Gwneud wrth Gosod
- Rhowch y gwefrydd yn llorweddol. Rhowch y gwefrydd ar rywbeth sy'n gallu gwrthsefyll gwres. PEIDIWCH â'i roi wyneb i waered. PEIDIWCH â'i wneud ar oleddf.
- Mae angen digon o le i'r gwefrydd oeri. Gwnewch yn siŵr bod y pellter rhwng y fewnfa aer a'r wal yn fwy na 300mm, a bod y pellter rhwng y wal a'r allfa aer yn fwy na 1000mm.
- Bydd y gwefrydd yn cynhyrchu gwres wrth weithio. Er mwyn sicrhau oeri da, gwnewch yn siŵr bod y gwefrydd yn gweithio mewn amgylchedd lle mae'r tymheredd yn -20% ~ 45 ℃.
- Gwnewch yn siŵr NAD fydd gwrthrychau tramor fel ffibrau, darnau papur, sglodion pren na darnau metel yn mynd i mewn i'r gwefrydd, neu gallai tân gael ei achosi.
- Ar ôl cysylltu â'r cyflenwad pŵer, PEIDIWCH â chyffwrdd â'r brwsh na'r electrod brwsh i osgoi'r risg o sioc drydanol.
- RHAID i'r derfynell ddaear fod wedi'i seilio'n dda i atal sioc drydanol neu dân.

CANLLAW GWEITHREDU
-
01
Trowch y switsh ymlaen i roi'r peiriant mewn modd wrth gefn.
-
02
2. Bydd AGV yn anfon signal yn gofyn am wefru pan nad oes gan yr AGV ddigon o bŵer.
-
03
Bydd yr AGV yn symud i'r gwefrydd ar ei ben ei hun ac yn gwneud lleoliad gyda'r gwefrydd.
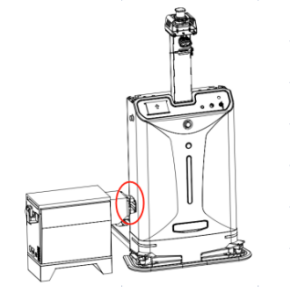
-
04
Ar ôl i'r lleoliad gael ei wneud yn dda, bydd y gwefrydd yn awtomatig yn rhoi ei frwsh allan i borthladd gwefru AGV i wefru AGV.
-
05
Ar ôl i'r gwefru gael ei gwblhau, bydd brwsh y gwefrydd yn tynnu'n ôl yn awtomatig a bydd y gwefrydd yn mynd i'r modd wrth gefn eto.

Pethau i'w Gwneud a Phethau i Beidio â'u Gwneud wrth Weithredu
- Gwnewch yn siŵr mai dim ond o dan arweiniad gweithwyr proffesiynol y bydd y gwefrydd yn cysylltu â'r cyflenwad pŵer.
- Gwnewch yn siŵr bod y gwefrydd yn sych ac yn rhydd o wrthrychau tramor y tu mewn pan fydd yn cael ei ddefnyddio.
- Gwnewch yn siŵr bod rhwystrau mwy na 0.5M i ffwrdd o ochr chwith a dde'r gwefrydd.
- Glanhewch y fewnfa a'r allfa aer bob 30 diwrnod calendr.
- Peidiwch â dadosod y gwefrydd ar eich pen eich hun, neu bydd yn achosi sioc drydanol. Efallai y bydd y gwefrydd yn cael ei ddifrodi wrth ei ddadosod ac efallai na fyddwch yn mwynhau gwasanaeth ôl-werthu oherwydd hynny.



