رقم الموديل:
AGVC-24V100A-YT
اسم المنتج:
شاحن بطارية ليثيوم 24 فولت 100 أمبير AGVC-24V100A-YT للمركبات الموجهة آليًا




فيديو المنتج
رسم تعليمي

الخصائص والمزايا
-
يتم استخدام تقنية التبديل الناعمة PFC+LLC لضمان عامل قدرة مرتفع، وتوافقيات تيار منخفضة، وتموج جهد وتيار صغير، وكفاءة تحويل تصل إلى 94% وكثافة عالية لطاقة الوحدة.
01 -
بفضل ميزة اتصال CAN، يمكنه التواصل مع بطارية الليثيوم BMS لإدارة شحن البطارية بذكاء لضمان الشحن السريع وعمر بطارية أطول.
02 -
تصميم مريح وواجهة مستخدم سهلة الاستخدام، تتضمن شاشة LCD، ولوحة لمس، ومؤشر LED، وأزرارًا. يمكن للمستخدم النهائي الاطلاع على معلومات الشحن وحالته، وإجراء عمليات وإعدادات مختلفة.
03 -
مع حماية من الشحن الزائد، والجهد الزائد، والتيار الزائد، ودرجة الحرارة الزائدة، والدائرة القصيرة، وفقدان طور الإدخال، والجهد الزائد للإدخال، والجهد المنخفض للإدخال، والشحن غير الطبيعي لبطارية الليثيوم، وتشخيص مشاكل الشحن وعرضها.
04 -
في الوضع التلقائي، يمكن شحنه تلقائيًا دون إشراف. كما يتوفر الوضع اليدوي.
05 -
مع ميزة التلسكوب؛ دعم الإرسال اللاسلكي وتحديد المواقع بالأشعة تحت الحمراء وCAN أو WIFI أو الاتصالات السلكية.
06 -
إرسال لاسلكي بترددات 2.4G، 4G، أو 5.8G. تحديد المواقع بالأشعة تحت الحمراء في وضع الإرسال والاستقبال، أو الانعكاس، أو الانعكاس المنتشر. إمكانية التخصيص متاحة للفرشاة وارتفاعها.
07 -
نطاق واسع من جهد الإدخال يمكنه توفير شحن مستقر وموثوق للبطارية في ظل مصدر طاقة غير مستقر.
08 -
تقنية التلسكوب الذكية لتتمكن من شحن المركبات الموجهة آليًا مع منفذ شحن على الجانب.
09 -
مستشعر ضوئي بالأشعة تحت الحمراء عالي الدقة لضمان تحديد المواقع بدقة أكبر.
010 -
يمكن شحن AGV بمنفذ شحن على الجانب أو في الأمام أو في الأسفل.
011 -
الاتصالات اللاسلكية لجعل شواحن AGV تتواصل وتتصل بـ AGV بذكاء. (شاحن AGV واحد إلى شاحن AGV واحد أو أكثر، شاحن AGV واحد إلى شاحن AGV واحد أو أكثر)
012 -
فرشاة من سبائك الفولاذ والكربون، تتميز بموصلية كهربائية ممتازة، وقوة ميكانيكية عالية، وعزل ممتاز، ومقاومة ممتازة للحرارة والتآكل.
013

طلب
لتوفير شحن سريع وآمن وتلقائي لمركبات AGV (المركبة الموجهة آليًا) بما في ذلك الرافعات الشوكية AGV، ومركبات AGV ذات الرافعات اللوجيستي، ومركبات AGV ذات الجر الكامن، وروبوتات وقوف السيارات الذكية، ومركبات AGV ذات الجر الثقيل في المطارات والموانئ البحرية والمناجم.






تحديد
| Mنموذجلا. | AGVC-24V100A-YT |
| تم تقييمهIالإدخالVالجهد | 220فولت ± 15% |
| مدخلVالجهدRأنجي | أحادي الطور ثلاثي الأسلاك |
| مدخلCالتيارRأنجي | <16 أمبير |
| تم تقييمهOالإخراجPزهرة | 2.4 كيلو واط |
| تم تقييمهOالإخراجCالتيار | 100 أمبير |
| الناتجVالجهدRأنجي | 16 فولت تيار مستمر - 32 فولت تيار مستمر |
| حاضِرLتقليدAقابل للتعديلRأنجي | 5 أمبير-100 أمبير |
| قمةNواز | ≤1% |
| الجهد االكهربىRالتنظيمAالدقة | ≤±0.5% |
| حاضِرSهارينج | ≤±5% |
| كفاءة | حمل الإخراج ≥ 50%، عند التصنيف، الكفاءة الإجمالية ≥ 92%؛ |
| حمل الإخراج <50%، عند التصنيف، تكون كفاءة الماكينة بأكملها ≥99% | |
| حماية | ماس كهربائي، تيار زائد، جهد زائد، اتصال عكسي، تيار عكسي |
| تكرار | 50 هرتز - 60 هرتز |
| عامل القدرة (PF) | ≥0.99 |
| التشوه الحالي (HD1) | ≤5% |
| مدخلPالحماية | الجهد الزائد، الجهد المنخفض، التيار الزائد |
| عملEالبيئةCالشروط | داخلي |
| عملTدرجة الحرارة | -20%~45℃، العمل بشكل طبيعي؛ 45℃~65℃، تقليل الإخراج؛ أكثر من 65℃، إيقاف التشغيل. |
| تخزينTدرجة الحرارة | -40 درجة مئوية - 75 درجة مئوية |
| نسبيHالرطوبة | 0 – 95% |
| ارتفاع | ≤2000 متر خرج الحمل الكامل؛ >2000م استخدمه وفقًا لأحكام 5.11.2 في GB/T389.2-1993. |
| عازلSالقوة
| المدخلات والمخرجات: 2800 فولت تيار مستمر/10 مللي أمبير/دقيقة واحدة |
| في الغلاف: 2800 فولت تيار مستمر/10 مللي أمبير/1 دقيقة | |
| الغلاف الخارجي: 2800 فولت تيار مستمر/10 مللي أمبير/دقيقة واحدة | |
| الأبعاد وWثمانية | |
| الأبعاد (الكل في واحد) | 530(ارتفاع)×580(عرض)×390(عمق) |
| شبكةWثمانية | 35 كجم |
| درجةPالحماية | IP20 |
| آخرs | |
| نظام إدارة البطارياتCالتواصلMالطريقة | اتصالات CAN |
| نظام إدارة البطارياتCاتصالMالطريقة | CAN-WIFI أو الاتصال المادي لوحدات CAN في AGV والشاحن |
| إرسال جالتواصلMالطريقة | Modbus TCP، Modbus AP |
| إرسال جاتصالMالطريقة | Modbus-wifi أو Ethernet |
| نطاقات واي فاي | 2.4G أو 4G أو 5.8G |
| طريقة بدء الشحن | الأشعة تحت الحمراء، Modbus، CAN-WIFI |
| مركبة موجهة آليًافرشاة Pالمعلمات | اتبع معايير AiPower أو الرسومات المقدمة من قبل العملاء |
| هيكلCهارجر | الكل في واحد |
| الشحنMالطريقة | فرشاة تلسكوبية |
| طريقة التبريد | تبريد الهواء القسري |
| تلسكوبيضربة فرشاة | 200 ملم |
| جيد دحالةلـ Pتحديد المواقع | 185 مم-325 مم |
| الارتفاع منمركبة موجهة آليًامركز الفرشاة إلى Gدائري | 90 مم - 400 مم؛ التخصيص متاح |
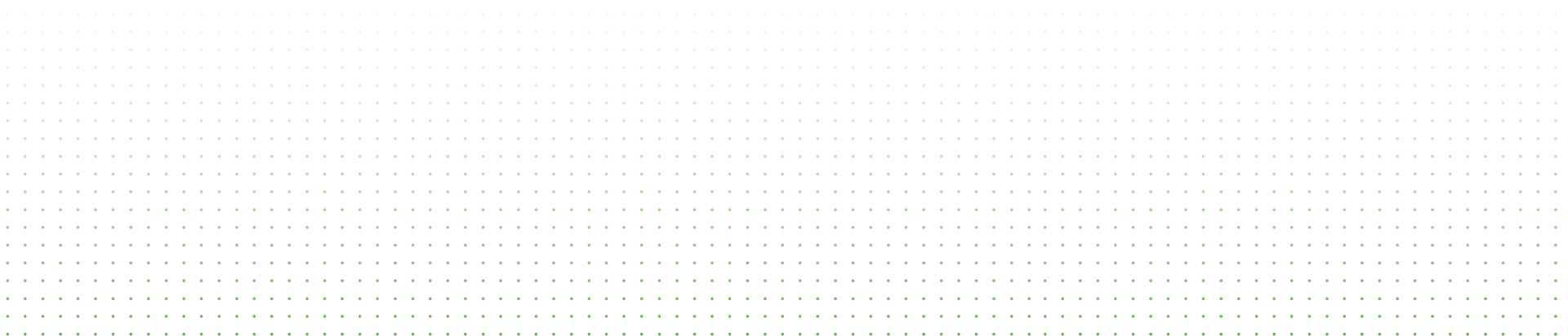
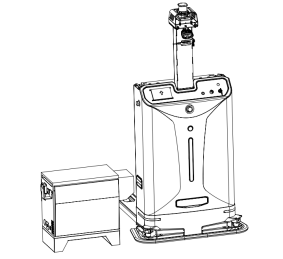
دليل التثبيت
افتح الصندوق الخشبي. يُرجى استخدام أدوات احترافية.
2. استخدم مفك براغي لتفكيك البراغي الموجودة في الجزء السفلي من الصندوق الخشبي الذي يثبت شاحن السيارة الكهربائية.

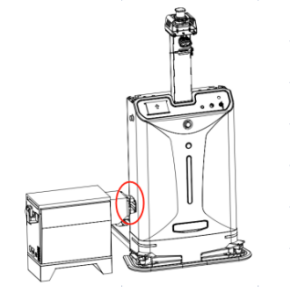
ضع الشاحن أفقيًا، واضبط أرجله لضمان وضع الشحن الصحيح. تأكد من أن العوائق تبعد أكثر من ٠.٥ متر عن جانبي الشاحن الأيمن والأيسر.

بشرط أن يكون مفتاح الشاحن مطفأً، يُرجى توصيل قابس الشاحن بالمقبس الكهربائي حسب عدد المراحل. يُرجى الاستعانة بفنيين للقيام بهذا العمل.

ما يجب فعله وما لا يجب فعله أثناء التثبيت
- ضع الشاحن أفقيًا. ضعه على سطح مقاوم للحرارة. لا تضعه مقلوبًا. لا تجعله مائلًا.
- يحتاج الشاحن إلى مساحة تبريد كافية. تأكد من أن المسافة بين مدخل الهواء والجدار لا تقل عن 300 مم، وأن المسافة بين الجدار ومخرج الهواء لا تقل عن 1000 مم.
- سيُصدر الشاحن حرارة أثناء التشغيل. لضمان تبريد جيد، يُرجى التأكد من تشغيل الشاحن في بيئة تتراوح درجة حرارتها بين -20% و45 درجة مئوية.
- تأكد من عدم دخول الأجسام الغريبة مثل الألياف أو قطع الورق أو رقائق الخشب أو الشظايا المعدنية إلى داخل الشاحن، وإلا فقد يتسبب ذلك في نشوب حريق.
- بعد توصيل الجهاز بمصدر الطاقة، لا تلمس الفرشاة أو قطب الفرشاة لتجنب خطر التعرض لصدمة كهربائية.
- يجب أن يكون الطرف الأرضي مؤرضًا جيدًا لمنع الصدمات الكهربائية أو الحرائق.

دليل التشغيل
-
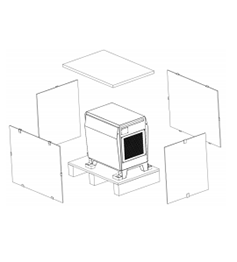
01
قم بتشغيل المفتاح لوضع الجهاز في وضع الاستعداد.
-
02
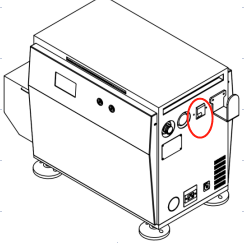
2. سوف يرسل AGV إشارة تطلب الشحن عندما لا يكون لدى AGV طاقة كافية.
-
03
سوف تتحرك المركبة الموجهة آليًا إلى الشاحن من تلقاء نفسها وتقوم بالتمركز مع الشاحن.
-
04
بعد تحديد الوضع بشكل جيد، سيقوم الشاحن تلقائيًا بإخراج الفرشاة الخاصة به في منفذ الشحن الخاص بـ AGV لشحن AGV.
-
05
بعد الانتهاء من الشحن، سوف تتراجع فرشاة الشاحن تلقائيًا وسينتقل الشاحن إلى وضع الاستعداد مرة أخرى.

ما يجب وما لا يجب فعله في التشغيل
- تأكد من أنه سيتم توصيل الشاحن بمصدر الطاقة فقط تحت إشراف المتخصصين.
- تأكد من أن الشاحن جاف وخالٍ من أي أجسام غريبة بالداخل عند استخدامه.
- تأكد من أن العوائق تبعد أكثر من 0.5 متر عن الجانبين الأيسر والأيمن للشاحن.
- قم بتنظيف مدخل ومخرج الهواء كل 30 يومًا تقويميًا.
- لا تفكّ الشاحن بنفسك، وإلا ستتعرض لصدمة كهربائية. قد يتلف الشاحن أثناء فكّه، وقد لا تستفيد من خدمة ما بعد البيع.



