Modelnommer:
AGVC-24V100A-YT
Produknaam:
24V100A Litiumbatterylaaier AGVC-24V100A-YT vir outomatiese begeleide voertuie




PRODUK VIDEO
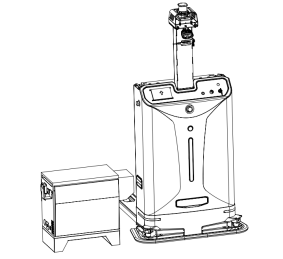
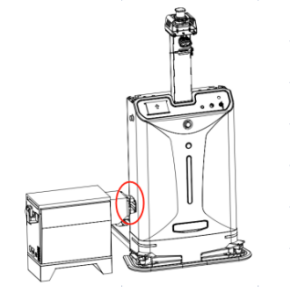
INSTRUKSIETEKENING

EIENSKAPPE EN VOORDELEN
-
PFC+LLC sagte skakeltegnologie word gebruik om hoë arbeidsfaktor, lae stroomharmonieke, klein spanning- en stroomrimpel, omskakelingsdoeltreffendheid so hoog as 94% en 'n hoë digtheid van modulekrag te verseker.
01 -
Met die funksie van CAN-kommunikasie kan dit met litiumbattery BMS kommunikeer om batterylading intelligent te bestuur om vinnige laai en langer batterylewe te verseker.
02 -
Ergonomiese ontwerp en gebruikersvriendelike gebruikerskoppelvlak, insluitend LCD-skerm, aanraakpaneel, LED-aanwysingslig en knoppies. Eindgebruikers kan laai-inligting en -status sien, verskillende bewerkings en instellings uitvoer.
03 -
Met beskerming teen oorlading, oorspanning, oorstroom, oortemperatuur, kortsluiting, insetfaseverlies, insetoorspanning, insetonderspanning, abnormale laai van litiumbatterye, en diagnose en vertoon van laaiprobleme.
04 -
In outomatiese modus kan dit outomaties laai sonder dat dit deur 'n persoon onder toesig is. Dit het ook 'n handmatige modus.
05 -
Met teleskopiese funksie; Ondersteun draadlose versending, infrarooi posisionering en CAN-, WIFI- of bedrade kommunikasie.
06 -
2.4G, 4G of 5.8G draadlose versending. Infrarooi posisionering in sender-ontvangs, weerkaatsing of diffuse weerkaatsing manier. Aanpassing beskikbaar vir kwas en die hoogte van die kwas.
07 -
Wye insetspanningsbereik wat die battery stabiele en betroubare laai onder onstabiele kragtoevoer kan bied.
08 -
Slim teleskopiese tegnologie om AGV's te kan laai met 'n laaipoort aan die kant.
09 -
Hoë-presisie infrarooi foto-elektriese sensor om meer akkurate posisionering te verseker.
010 -
In staat om vir AGV te laai met laaipoort aan die kant, voor of onder.
011 -
Draadlose kommunikasie om AGV-laaiers slim te laat kommunikeer en AGV te koppel. (een AGV na een of verskillende AGV-laaiers, een AGV-laaier na een of verskillende AGV)
012 -
Staal-koolstoflegeringsborsel met goeie elektriese geleidingsvermoë. Sterk meganiese sterkte, uitstekende isolasie, goeie hittebestandheid en hoë korrosiebestandheid.
013

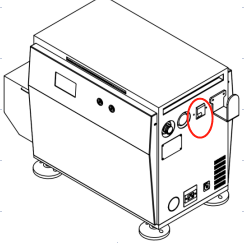
TOEPASSING
Om vinnige, veilige en OUTOMATIESE laai vir AGV's (Outomatiese Begeleide Voertuie) te verskaf, insluitend AGV-vurkhysers, logistieke sorteer-krikke, latente traksie-AGV's, intelligente parkeerrobotte, swaar traksie-AGV's by lughawens, seehawens en myne.






SPESIFIKASIES
| MmodelNee. | AGVC-24V100A-YT |
| GegradeerIinvoerVouderdom | 220VAC ± 15% |
| InvoerVouderdomRange | Enkelfase driedraads |
| InvoerChuidigeRange | <16A |
| GegradeerOuitvoerPkrag | 2.4 kW |
| GegradeerOuitvoerChuidige | 100A |
| UitsetVouderdomRange | 16VDC-32VDC |
| HuidigeLimiteerAverstelbaarRange | 5A-100A |
| PiekNoise | ≤1% |
| SpanningRreguleringAakkuraatheid | ≤±0.5% |
| HuidigeSharing | ≤±5% |
| Doeltreffendheid | Uitsetlas ≥ 50%, wanneer gegradeer, die algehele doeltreffendheid ≥ 92%; |
| Uitsetlas <50%, wanneer dit gegradeer word, is die doeltreffendheid van die hele masjien ≥99% | |
| Beskerming | Kortsluiting, oorstroom, oorspanning, omgekeerde verbinding, omgekeerde stroom |
| Frekwensie | 50Hz - 60Hz |
| Kragfaktor (PF) | ≥0.99 |
| Huidige vervorming (HD1) | ≤5% |
| InvoerPbeskerming | Oorspanning, onderspanning, oorstroom |
| WerkEomgewingCvoorwaardes | Binnenshuis |
| WerkTtemperatuur | -20%~45℃, werk normaalweg; 45℃~65℃, verminderde uitset; bo 65℃, afskakeling. |
| BergingTtemperatuur | -40℃- 75℃ |
| RelatiefHvogtig | 0 – 95% |
| Hoogte | ≤2000m volle lasuitset; >2000m gebruik dit in ooreenstemming met die bepalings van 5.11.2 in GB/T389.2-1993. |
| DiëlektrieseSkrag
| IN-UIT: 2800VDC/10mA/1Min |
| IN-DOPPIE: 2800VDC/10mA/1Min | |
| BUITE-DOPS: 2800VDC/10mA/1Min | |
| Afmetings enWagt | |
| Afmetings (alles-in-een)) | 530(H)×580(B)×390(D) |
| NettoWagt | 35 kg |
| Graad vanPbeskerming | IP20 |
| Anders | |
| BMSCkommunikasieMmetode | KAN-kommunikasie |
| BMSCverbindingMmetode | KAN-WIFI of fisiese kontak van KAN-modules by AGV en laaier |
| Versending CkommunikasieMmetode | Modbus TCP, Modbus AP |
| Versending CverbindingMmetode | Modbus-wifi of Ethernet |
| WIFI-bande | 2.4G, 4G of 5.8G |
| Wyse van beginlaai | Infrarooi, Modbus, CAN-WIFI |
| AGVBorsel Pparameters | Volg die AiPower-standaard of tekeninge wat deur kliënte verskaf word |
| Struktuur vanCharder | Alles in een |
| LaaiMmetode | Borsel Teleskopiese |
| Verkoelingsmetode | Gedwonge lugverkoeling |
| TeleskopieseKwasstreep | 200MM |
| Goeie Dafstandvir Pposisionering | 185MM-325MM |
| Hoogte vanafAGVBorselsentrum na die Grond | 90MM-400MM; Aanpassing beskikbaar |
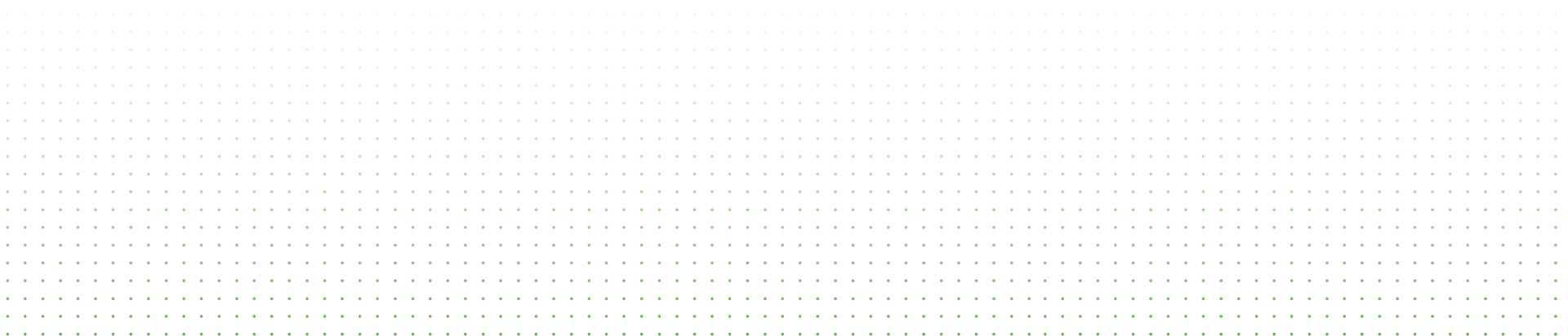
INSTALLASIEGIDS
Pak die houtkissie uit. Gebruik asseblief professionele gereedskap.
2. Gebruik 'n skroewedraaier om die skroewe aan die onderkant van die houtkissie wat die EV-laaier vasmaak, uitmekaar te haal.

Plaas die laaier horisontaal en verstel die pote om die regte laaiposisie te verseker. Maak seker dat hindernisse meer as 0.5 m van die linker- en regterkant van die laaier af is.

Op voorwaarde dat die laaier se skakelaar afgeskakel is, koppel die laaier se prop aan die sok gebaseer op die aantal fases. Vra asseblief professionele persone om hierdie werk te doen.

Dos en Moenies tydens installasie
- Plaas die laaier horisontaal. Plaas die laaier op iets wat hittebestand is. MOENIE dit onderstebo sit nie. MOENIE dit skuins maak nie.
- Die laaier benodig genoeg ruimte vir verkoeling. Maak seker dat die afstand tussen die luginlaat en die muur meer as 300 mm is, en die afstand tussen die muur en die luguitlaat meer as 1000 mm is.
- Die laaier sal hitte produseer wanneer dit werk. Om goeie verkoeling te verseker, maak asseblief seker dat die laaier werk in 'n omgewing waar die temperatuur -20%~45℃ is.
- Maak seker dat vreemde voorwerpe soos vesels, papierstukke, houtspaanders of metaalfragmente NIE binne-in die laaier sal kom nie, anders kan dit brand veroorsaak.
- Nadat u aan die kragtoevoer gekoppel is, MOENIE die borsel of borselelektrode aanraak om die risiko van elektriese skok te vermy nie.
- Die aardterminal MOET goed geaard wees om elektriese skok of brand te voorkom.

BEDRYFSGIDS
-
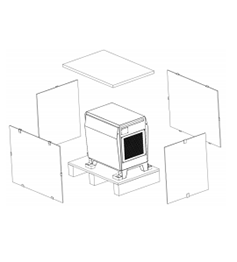
01
Skakel die skakelaar aan om die masjien in bystandmodus te plaas.
-
02
2. AGV sal 'n sein stuur wat vra vir laai wanneer die AGV nie genoeg krag het nie.
-
03
Die AGV sal self na die laaier beweeg en posisionering met die laaier doen.
-
04
Nadat die posisionering goed gedoen is, sal die laaier outomaties sy borsel in die laaipoort van AGV uitsteek om AGV te laai.
-
05
Nadat die laai klaar is, sal die laaier se borsel outomaties terugtrek en die laaier sal weer na bystandmodus gaan.

Dos en Don'ts in Operasie
- Maak seker dat die laaier slegs onder leiding van professionele persone aan die kragtoevoer gekoppel sal word.
- Maak seker dat die laaier droog en vry van vreemde voorwerpe binne is wanneer dit gebruik word.
- Maak seker dat obstruksies meer as 0.5 m van die linker- en regterkant van die laaier af is.
- Maak die luginlaat en -uitlaat elke 30 kalenderdae skoon.
- Moenie die laaier self uitmekaar haal nie, anders kan dit 'n elektriese skok veroorsaak. Die laaier kan tydens die uitmekaarhaal beskadig word en u mag dalk nie na-verkope diens geniet nie.



