Model No.:
AGVC-24V100A-YT
Product Name:
24V100A Lithium Battery Charger AGVC-24V100A-YT for Automated Guided Vehicles




PRODUCT VIDEO
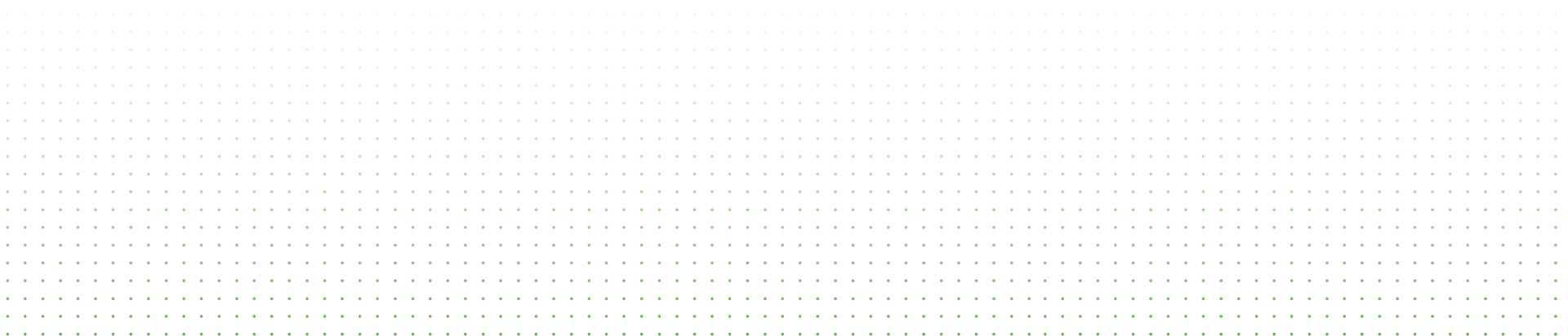
INSTRUCTION DRAWING

CHARACTERISTICS & ADVANTAGES
-
PFC+LLC soft switching technology used to ensure high power factor, low current harmonics, small voltage and current ripple, conversion efficiency as high as 94% and and high density of module power.
01 -
With the feature of CAN communication, it can communicate with lithium battery BMS to intelligently manage battery charging to ensure fast charging and longer battery life.
02 -
Ergonomic in appearance design and user-friendly in UI, including LCD display, touch panel, LED indication light and buttons. End-users can see charging information and status, do different operations and settings.
03 -
With protection of overcharge, over-voltage, over-current, over-temperature, short circuit, input phase loss, input over-voltage, input under-voltage, lithium battery abnormal charging, and diagnosis and displaying of charging problems.
04 -
Under automatic mode, it can charge automatically without being supervised by a person. It also has manual mode.
05 -
With telescoping feature; Supporting wireless dispatching, infrared positioning and CAN, WIFI or wired communication.
06 -
2.4G, 4G or 5.8G Wireless dispatching. Infrared positioning in transmitting-receiving, reflection or diffuse reflection way. Customization available for brush and the height of brush.
07 -
Wide input voltage range that can provide battery with stable and reliable charging under unstable power supply.
08 -
Smart telescoping technology to be able to charge for AGV with charging port at the side.
09 -
High-precision infrared photoelectric sensor to ensure more precise positioning.
010 -
Able to charge for AGV with charging port at the side, at the front or at the bottom.
011 -
Wireless communication to smartly make AGV chargers to communicate and connect AGV. ( one AGV to one or different AGV chargers, one AGV charger to one or different AGV)
012 -
Steel-carbon alloy brush with great electrical conductivity. Strong mechanical strength, excellent insulation, great heat resistance and high corrosion resistance.
013

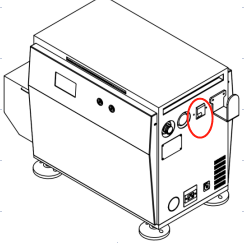
APPLICATION
To provide fast, safe and AUTOMATIC charging for AGV (Automated Guided Vehicle) including AGV forklifts, logistics sorting jacking AGVs, latent traction AGVs, intelligent parking robots, heavy-duty traction AGVs at airports, seaports and mines.






SPECIFICATIONS
|
Model No. |
AGVC-24V100A-YT |
|
Rated Input Voltage |
220VAC±15% |
|
Input Voltage Range |
Single-phase three-wire |
|
Input Current Range |
<16A |
|
Rated Output Power |
2.4KW |
|
Rated Output Current |
100A |
|
Output Voltage Range |
16VDC-32VDC |
|
Current Limit Adjustable Range |
5A-100A |
|
Peak Noise |
≤1% |
|
Voltage Regulation Accuracy |
≤±0.5% |
|
Current Sharing |
≤±5% |
|
Efficiency |
Output load ≥ 50%, when rated, the overall efficiency ≥ 92%; |
|
Output load<50%, when rated, the efficiency of the whole machine is ≥99% |
|
|
Protection |
Short-circuit, over-current, over-voltage, reverse connection, reverse current |
|
Frequency |
50Hz- 60Hz |
|
Power Factor (PF) |
≥0.99 |
|
Current Distortion (HD1) |
≤5% |
|
Input Protection |
Over-voltage, under-voltage, over-current |
|
Working Environment Conditions |
Indoor |
|
Working Temperature |
-20%~45℃, working normally; 45℃~65℃, reducing output; over 65℃, shutdown. |
|
Storage Temperature |
-40℃- 75℃ |
|
Relative Humidity |
0 – 95% |
|
Altitude |
≤2000m full load output; >2000m use it in accordance with the provisions of 5.11.2 in GB/T389.2-1993. |
|
Dielectric Strength
|
IN-OUT: 2800VDC/10mA/1Min |
|
IN-SHELL: 2800VDC/10mA/1Min |
|
|
OUT-SHELL: 2800VDC/10mA/1Min |
|
|
Dimensions and Weight |
|
|
Dimensions (all-in-one)) |
530(H)×580(W)×390(D) |
|
Net Weight |
35Kg |
|
Degree of Protection |
IP20 |
|
Others |
|
|
BMS Communication Method |
CAN communication |
|
BMS Connection Method |
CAN-WIFI or physical contact of CAN modules at AGV and charger |
|
Dispatching Communication Method |
Modbus TCP, Modbus AP |
|
Dispatching Connection Method |
Modbus-wifi or Ethernet |
|
WIFI Bands |
2.4G, 4G or 5.8G |
|
Mode of Starting Charging |
Infrared, Modbus, CAN-WIFI |
|
AGV Brush Parameters |
Follow AiPower standard or drawings provided by customers |
|
Structure of Charger |
All in one |
|
Charging Method |
Brush Telescoping |
|
Cooling method |
Forced air cooling |
|
Telescopic Stroke of Brush |
200MM |
|
Good Distance for Positioning |
185MM-325MM |
|
Height from AGV Brush Center to the Ground |
90MM-400MM; Customization available |
INSTALLATION GUIDE
Unpack the wooden box. Please do use professional tools.
2.Use a screwdriver to disassemble the screws at the bottom of the wooden box that fix the EV charger.

Put the charger on the horizontal and adjust the legs to ensure the right charging position. Make sure obstacles are more than 0.5M away from the left and right sides of the charger.

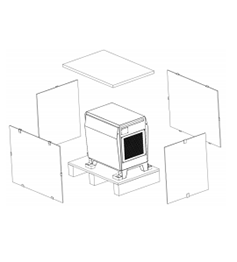
On the condition that the charger’s switch is off, well connect the charger’s plug with the socket based on the number of phase. Do ask professionals to do this work please.

Dos And Don’Ts In Installation
- Put the charger on the horizontal. Put the charger on something that is heat-resistant. Do NOT put it upside down. Do NOT make it slope.
- The charger need enough room for cooling. Make sure the distance between the air inlet and the wall is more than 300mm, and the distance between the wall and the air outlet is more than 1000mm.
- The charger will produce heat when working. To ensure good cooling, please make sure the charger works in an environment where temperature is -20%~45℃.
- Make sure that foreign objects such as fibers, paper pieces, wood chips or metal fragments will NOT go inside the charger, or fire may be caused.
- After connecting to the power supply, do NOT touch the brush or brush electrode to avoid the risk of electric shock.
- The ground terminal MUST be well grounded to prevent electric shock or fire.

OPERATION GUIDE
-
01
Turn on the switch to put the machine in standby mode.
-
02
2.AGV will send a signal asking for charging when the AGV does not have enough power.
-
03
The AGV will move to the charger by itself and do positioning with the charger.
-
04
After the positioning is well done, the charger will automatically stick out its brush into the charging port of AGV to charge AGV.
-
05
After charging is done, the charger’s brush will automatically retract and the charger will go to standby mode again.

Dos and Don’ts In Operation
- Make sure that only under the guidance of professionals will the charger connect to the power supply.
- Make sure the charger is dry and free of foreign objects inside when it is in use.
- Make sure obstacles are more than 0.5M away from the left and right side of the charger.
- Clean the air inlet and outlet every 30 calendar days.
- Do not disassemble the charger by yourself, or electric shock will be caused. Charger might be damaged during your disassembling and you may not enjoy after-sale service due to that.



